Функции преобразования электронных измерительных цепей датчиков.
Наибольшее распр-е получили: цепь делителя напряжения и мостовая схема. При воздействии измеряемой величины изменяется либо одно сопротивленияе плеча, либо 2, либо все 4 для мостовой схемы. Для опред-я фун-ии преобр-я измерит-ой цепи необх-мо четко сформулировать что яв-ся вход. и выход. величинами.
Uвых=U*z1/(z1+z2)
будем считать хар-ки – ф-ии преобр-я отд-х блоков линейными. Ki=f(xi-1) – линейн. (1.1) Xi=Ki*Xi-1+Xoi (1.2) Ki=tg(αi) Xio=Xi(0) – смещение характеристики преоб-я В некоторых случаях вход-м сигналом звена Xi’ м.б. разность м/у вых-м сигналом передаточного звена и уставкой. Xi’=Xi-1 – Xуст Вых-й сигнал можно записать: Xвых=K*Xвх + Xc (1.3)
Xc=Xc1(K/K1)+Xc2(K/K1*K2)+…+Xcn=(∑K*Xci)/П Kj (1.4)
Наиболее часто требуемый вых-й сигнал НИП должен проходить ч/з начало координат. Хс=0 – вых-й сигнал в номинальных условиях на ноль. Кн=P Кiн;, где Кiн – номинальный коэффициент преобразования i-го звена При изменении t-ры, давления, и т.д. т.е. окружающих условий происходит дополнительное смещение (дрейф характер-к) – преобразов-е харак-ик отдель-х блоков на величину DХсi; DХс=åDХсi*K / П Кj При этом возникает абсолютная погрешность преобразования D=Хвых – Хвых н=(К - Кн)*Хвх+Хс Кi=Kiн*(1+dкi); dкi=D Кi/ Kiн (относительное изменение Кi) Допускаем, что dкi<<1, тогда D= Хвых н*ådкi + Хс Макс-е знач-е этих погр-ей имеет место при одинаковых знаках dкi и Хс Хвх=Хвх max. Первое слагаемое представ-ет собой мультипликативную погрешность. Как видно из полученных выражений отнош-е выражений относит-е изменение коэф-ов Кi и смещ-е DХсi д.б. достаточно малы, что заставляет охватывать отд-е звенья разного НИП глубокими ООС или исполнять в соответственных случаях высокостабиль-е элементы, либо осущ-ть период-ю коррекцию дрейфа и крутизну характеристики.
|
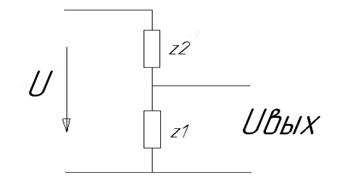
 -модуль реактивного сопротивления (изменяем z1)
-модуль реактивного сопротивления (изменяем z1)