Устройство и принцип работы прибора
9.1 Принцип действия
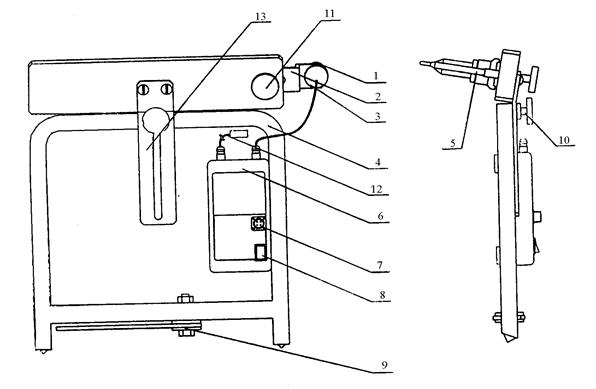
Принцип действия прибора основан на измерении угла поворота рулевого колеса АТС, посредством преобразования импульсного сигнала оптико-механического датчика угла поворота, в интервале срабатываний индуктивного датчика движения управляемых колес при выборе люфта рулевого управления в обоих направлениях вращения руля. Конструктивно прибор выполнен в виде приборного блока, который крепится на руле АТС и выносного датчика движения управляемых колёс. В приборном блоке размещаются оптико-механический преобразователь угла поворота, буквенно-цифровой индикатор и микропроцессорный преобразователь сигналов. Датчик движения колеса (рис. 3.1) выполнен в виде металлической стойки с выдвижной поворотной ножкой. В верхней части стойки расположен перемещаемый кронштейн с индуктивным датчиком. На нижней части стойки закреплена аккумуляторная батарея с блоком обработки сигналов с индуктивного датчика. На аккумуляторной батарее расположен кабель подключения к приборному блоку, разъём для подключения зарядного устройства и кабеля внешнего питания.
Рисунок 3.1 Датчик движения колеса. 1 – датчик индуктивный; 2 – пластина; 3 – гайка зажимная; 4 – стойка; 5 – штырь; 6 – аккумуляторная батарея; 7 – разъём подключения внешнего питания или зарядного устройства; 8 – переключатель режима питания; 9 – ножка поворотная; 10 – барашек фиксации высоты кронштейна; 11 – барашек фиксации положения датчика индуктивного; 12 – кабель подключения к приборному блоку; 13 – конштейн.
9.2. Конструкция прибора
Прибор (рис. 3.2) состоит из следующих частей: Приборный блок 1 – электронный блок обработки и отображения информации с органами управления и оптико-механическим датчиком измерения угла; Захват 2 – телескопический, пружинный механизм, устанавливаемый и фиксируемый на ободе рулевого колеса за счет усилия трения, обеспечиваемого растяжением пружин; Тяга 3 – для обеспечения проведения измерений при наклонах оси рулевой колонки менее 30 град. от вертикальной оси. На боковой стенке приборного блока расположены: разъем 4 для связи с ПЭВМ; разъем 5 для подключения датчика движения колеса; выключатель питания 6.
Рисунок 3.2 Прибор ИСЛ – М 1- приборный блок; 2 – захват; 3 – тяга; 4 – разъём связи с ПЭВМ; 5 – разъём датчика движения колеса; 6 – выключатель питания; 7 – кабель питания от гнезда прикуривателя.
9.3. Функциональная схема прибора
Изменение индуктивного сопротивления датчика движения колеса при перемещении штока преобразуются в эквивалентное изменение напряжений и через усилители поступают на входы аналого-цифрового преобразователя микропроцессора PIC 16F876 фирмы MICROCHIP. Отсчет угла производится с момента, когда датчик движения колеса определяет перемещение обода колеса более 3,1 мм.
Рисунок 3.3 Функциональная схема прибора Угол отсчитывается до момента, пока управляемое колесо не начинает движение в противоположную сторону. По окончании измерения прибор автоматически передаёт результаты измерения в линию технического контроля по протоколу RS-232
|