
Двухкаскадный гидроусилитель
В большинстве случаев управление приводом происходит с помощью гидроусилителя. Двухкаскадный гидроусилитель, имеющий первый каскад типа сопло-заслонка, а второй типа исполнительный цилиндр, является одним из наиболее распространённых типов таких усилительных устройств.
Запишем уравнения линейной модели золотника первого каскада:
где cз0 — коэффициент пропорциональности между перепадом давлений и углом поворота заслонки; H1 — коэффициент вязкого трения на поверхности золотника; x3 — перемещение золотника; Fз — площадь поперечного сечения золотника; mз — масса золотника; xз — перемещение золотника; cз — жёсткость пружин; cзг — коэффициент гидродинамической силы. Исключая из уравнений p0, получим разрешающее дифференциальное уравнение первого каскада, а следовательно и передаточную функцию первого каскада гидроусилителя:
Линеаризованное уравнение расхода второго каскада можно записать в следующей форме:
где μпxз — расход жидкости, поступающей в силовой гидроцилиндр; Fп — активная площадь поршня силового гидроцилиндра; μп — коэффициент пропорциональности; xп — перемещение поршня силового гидроцилиндра; cуп — приведённый коэффициент утечек; pп — перепад давления в силовом гидроцилиндре; Vп — объём жидкости в напорном тракте силового гидроцилиндра при среднем положении поршня; ρ; — модуль объёмной упругости жидкости, учитывающий деформацию стенок тракта; Принимая зависимость угла поворота люльки γ; от xn линейной γ = kγxn, а также, имея в виду, что второй каскад эксплуатируется с существенной недогрузкой по развиваемому гидроусилителем моменту, получим линеаризованное уравнение динамического равновесия
где Fп — активная площадь поршня; Rп — плечо от центра крепления штока относительно центра люльки; Jп — момент инерции люльки; Hп — экспериментально определяемый коэффициент вязкого трения люльки. Уравнения второго каскада образуют совместную систему уравнений. Исключая из этой системы функциональные координаты xп и pп, получим зависимость угла поворота люльки от смещения золотника
Передаточная функция содержит в знаменателе трёхчлен второго порядка и множитель s. Если коэффициент затухания больше или равен единице, то этот трёхчлен распадается на два множителя с постоянными времени T2а и T2в и звено будет интегрирующим и одновременно двойным апериодическим. Обычно оказывается, что T2а и T2в достаточно малы, поэтому при cуп → 0 и ρ → ∞; уравнение упрощается:
а передаточная функция второго каскада гидроусилителя будет:
Полная передаточная функция рассматриваемой модификации гидроусилителя будет произведением передаточных функций первого и второго каскадов:
где k12 = k1∙k2*. Если второй каскад будет охвачен жёсткой обратной связью, то аналогично можно получить передаточную функцию для всего гидроусилителя в виде
где
Состав гидропривода и его передаточная функция Поскольку насос и гидромотор не являются однонаправленными звеньями, целесообразно при составлении передаточной функции рассматривать работу насоса вместе с гидромотором и нагрузкой, тем более, что короткие трубопроводы обычно не рассматриваются в качестве систем с распределёнными параметрами. Агрегат насос-мотор-нагрузка является звеном однонаправленного действия. В качестве координаты входа примем угол поворота люльки γ;, а координаты выхода — угол поворота вала гидромотора α;. Вывод передаточной функции привода базируется на двух основных уравнениях: уравнении расхода и уравнении нагрузки на валу гидромотора. Уравнение расхода имеет вид: Qн = Q + Qу + Qс, где Qн — подача насоса без учёта утечек; Q — расход через гидромотор при отсутствии утечек; Qу — суммарные утечки; Qс — расход, обусловленный деформацией жидкости. Имея в виду, что скорость гидромотора Ω, умножая на его характерный размер ω;, даёт Q, можно почленным делением уравнения на ω; получить
где Ωу — потеря скорости из-за утечек; Ωс — изменение скорости из-за деформации жидкости. Уравнение расхода может быть записано в виде:
где Имея в виду, что развиваемый гидромотором индикаторный (без учёта механических потерь) момент, в соответствии с равенством M = ω ∙p, а динамический момент определяется приведёнными к валу ротора моментами инерции нагрузки и вращающихся частей гидромотора I0 можно записать M = Mд + Mс, где где Iн — момент инерции нагрузки; i — передаточное отношение от гидромотора к нагрузке. Следовательно,
причём механические потери в гидромоторе относят к Mс, тем более, что значение F определяется экспериментально при одновременном исследовании гидромотора, передаточного механизма и нагрузки. Полученная система линейных дифференциальных уравнений с постоянными коэффициентами
Исключая p и заменяя оператор дифференцирования буквой s, получаем
Получаем передаточную функцию гидропривода:
Поскольку Выражения постоянной времени Чем больше утечки в гидроприводе (чем меньше объёмный КПД), тем выше коэффициент затухания. Чем больше объём полости высокого давления V, т.е. чем длиннее трубопроводы между насосом и гидромотором, тем меньше коэффициент затухания и, следовательно, тем сильнее проявляется колебательный процесс в переходных режимах. Чем больше объём полости высокого давления и выше момент инерции нагрузки, тем больше постоянная времени гидропривода, и тем, следовательно, меньше его собственная частота. Увеличение момента инерции повышает коэффициент затухания. Момент инерции и мощность гидропривода определяются заданной нагрузкой и энергетическим расчётом привода. Таким образом, уменьшение колебательности определяется уменьшением объёма полости высокого давления, т.е. сокращением длины труб между насосом и гидромотором. Второй путь заключается в искусственном повышении утечек, что приводит к уменьшению КПД.
Электромеханический преобразователь типа позиционного электромагнита:
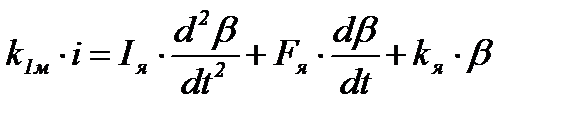
Уравнение равновесия моментов, действующих на якорь:
где kя = k3 + k2м. Коэффициенты моментов для конструкции элекромагнита имеют значения:
Уравнение напряжений цепи обмотки управления:
где Uу — управляющее напряжение, приложенное к обмотке управления, Rу — омическое сопротивление цепи обмотки управления, Lу — коэффициент самоиндукции цепи обмотки управления, cя — коэффициент пропорциональности ЭДС, наводимой в обмотке управления при повороте якоря со скоростью В изображения при нулевых начальных условиях уравнения электромеханического преобразователя принимают вид:
Исключая i, получим выражение передаточной функции:
В общем виде знаменатель нельзя представить в форме элементарных множителей и анализ характеристического уравнения проводится для конкретных численных значений коэффициентов. Анализ существенно упростится, если пренебречь величиной ЭДС, наводимой в обмотке управления при скорости поворота якоря, по сравнению с другими напряжениями, входящими во второе уравнение системы. (cя → 0).
Тогда
где причём:
|

 ,
, .
. .
. ,
, — геометрический расход жидкости, поступающей в гидроцилиндр при отсутствии утечек и деформаций в нём жидкости;
— геометрический расход жидкости, поступающей в гидроцилиндр при отсутствии утечек и деформаций в нём жидкости;  — расход рабочей жидкости за счёт её упругости; цифра 2 в знаменателе обусловлена существованием эффекта деформации рабочего тела одновременно в обеих магистралях силового гидроцилиндра.
— расход рабочей жидкости за счёт её упругости; цифра 2 в знаменателе обусловлена существованием эффекта деформации рабочего тела одновременно в обеих магистралях силового гидроцилиндра. ,
, .
. ,
,
 ,
, ,
, ;
;  ;
;  , kп — коэффициент пропорциональности между перемещением люльки и перемещением поршеньков обратной связи.
, kп — коэффициент пропорциональности между перемещением люльки и перемещением поршеньков обратной связи. ,
, ,
, — коэффициент пропорциональности между Ωх холостого хода и γ; — угла наклона блока цилиндров насоса; α; — угол поворота вала гидромотора; cу — экспериментально определённый коэффициент утечек; p — перепад давления; cс — коэффициент сжимаемости жидкости.
— коэффициент пропорциональности между Ωх холостого хода и γ; — угла наклона блока цилиндров насоса; α; — угол поворота вала гидромотора; cу — экспериментально определённый коэффициент утечек; p — перепад давления; cс — коэффициент сжимаемости жидкости. — линеаризованный момент активного сопротивления;
— линеаризованный момент активного сопротивления;  ,
, ,
, .
. .
. , то если не делается специальной оговорки, в дальнейшем будем принимать kг ≈ μх.
, то если не делается специальной оговорки, в дальнейшем будем принимать kг ≈ μх. и коэффициента затухания
и коэффициента затухания  могут быть упрощены для наиболее часто встречающихся случаев, когда I > F и cу >> cс (всегда), а значит Icу >> Fcс:
могут быть упрощены для наиболее часто встречающихся случаев, когда I > F и cу >> cс (всегда), а значит Icу >> Fcс:  ;
;  .
.
 ,
, ;
;  , где Bв — индукция в зазоре от потока возбуждения, ωy — число витков обмотки управления, Rя — радиус приложения к якорю равнодействующей тягового усилия электромагнита, a — ширина полюса, b — толщина полюса и якоря, x0 — средняя величина воздушного зазора.
, где Bв — индукция в зазоре от потока возбуждения, ωy — число витков обмотки управления, Rя — радиус приложения к якорю равнодействующей тягового усилия электромагнита, a — ширина полюса, b — толщина полюса и якоря, x0 — средняя величина воздушного зазора. ,
, .
. ,
, .
. .
. ,
, .
. — коэффициент усиления электромеханического преобразователя; Tу — электромагнитная постоянная времени обмотки управления; Tя — механическая постоянная времени якоря; ζя — коэффициент затухания;
— коэффициент усиления электромеханического преобразователя; Tу — электромагнитная постоянная времени обмотки управления; Tя — механическая постоянная времени якоря; ζя — коэффициент затухания; ;
; 



