
Системи координат в GPS
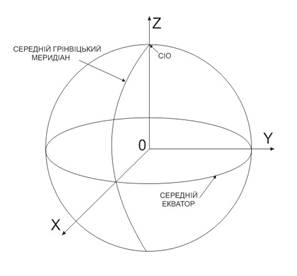
У СРНС використовують дві системи координат – інерціальну та земну. Елементи орбіт ШСЗ визначаються у інерціальній системі координат, а координати обєктів – у земній системі координат. Цим і повязана необхідність застосування двох типів систем координат і встановлення однозначного взаємозвязку між ними. Умовна інерціальна система, як і перехід до умовної земної, описані в темі 2. Для вирішення проблем геодезії та геодинаміки прийнята Умовна земна система (CTS – Conventional Terrestial System). Це геоцентрична просторова ортогональна система координат. Початок CTS суміщений із центром мас Землі. Оскільки положення осі обертання Землі безперервно змінюється внаслідок дії непередбачуваних геофізичних явищ, то у CTS вісь Z прийнято орієнтувати вздовж середньої осі обертання Землі, положення якої визначено за певний проміжок часу. Ця вісь відповідає середньому положенню осі обертання Землі. Відповідне положення полюсу Землі називається Міжнародним умовним початком (СIO – Conventional
International Origin). Відносно СIO визначається миттєве положення полюсу Землі, яке публікується у бюлетені Міжнародної служби обертання Землі (IERS – International Earth Rotation Service). Вісь X співпадає з лінією, утвореною перетином середнього екватора Землі і середнього Грінвіцького мередіану. Вісь Y знаходиться у площині середнього екватора і перпендикулярна до осей X і Z і утворює з ними правосторонню ортогональну систему координат.
Рис 9.1 Умовна земна система координат
З 1988 року на IERS (Міжнародна служба обертання Землі і опорних систем координат) покладено обов’язки встановлення найкращої практичної реалізації земної системи координат CTS. З цією метою постійно уточнюються параметри обертання Землі. За результатами вимірів методами VLBI (інтерферометрія з наддовгою базою), SLR (супутникова лазерна локація), DORIS (допплерівська орбітографія), лазерної локації Місяця (LLR), та GPS спостережень у мережі міжнародної геодинамічної служби
(IGS) визначається рух полюса та початкового меридіану, уточнюються геоцентричні координати фундаментальних геодезичних обсерваторій і контролюються їх взаємні зміщення, обумовлені тектонічними рухами. Фундаментальні обсерваторії, як правило, виконують комплекс VLBI, SLR та GPS – спостережень, а деякі оснащені апаратурою для LLR. З 1991 року система координат CTS узагальнена під назвою International Terrestrial Reference System (Міжнародна земна референтна система) - ITRS, що включає теоретичні положення та практичні реалізації загальноземної системи координат International Terrestrial Reference Frame (ITRF). У рамках Європейського континенту існує аналогічна до IERS служба European Terrestrial Reference System (ETRS) і, відповідно, практичні реалізації земної системи координат European Terrestrial Reference Frame (ETRF), які використовують результати спостережень геодезичних обсерваторій, розташованих виключно у Європі. У зв’язку із безперервним зростанням кількості геодезичних обсерваторій і результатів спостережень та динамічними процесами, які відбуваються у земній корі, виникає постійна необхідність удосконалення систем координат ITRF. Нові реалізації систем координат мають назви ITRF-YY, ETRF-YY. Існують наступні їх реалізації ITRF-88, …, ITRF-2000 і аналогічні ETRF – реалізації. Кожна наступна реалізація є більш удосконаленою, оскільки використовує більш тривалий обсяг спостережень, виконаних на більшій кількості станцій з використанням остаточних результатів, отриманих у різних центрах обробки вимірів (див. табл. 9.1).
Таблиця 9.1 Вихідні дані при встановленні систем координат ITRF
|
 Трансформація координат із однієї ITRF – реалізації у іншу проводиться із використанням 7- ми параметрів перетворення Гельмерта:
Трансформація координат із однієї ITRF – реалізації у іншу проводиться із використанням 7- ми параметрів перетворення Гельмерта:



