
Прогнозирование параметров
Задача прогнозирования Т.С. одномерного объекта формулируется следующим образом: пусть контролируемый параметр «Х» (например, диаметр вала в подшипнике скольжения) объекта в моменты контроля
Рис.123. график изменения параметра Х по времени
Если период между очередными моментами контроляравен Для прогнозирования параметров может использоваться линейная интерполяция – замена функции При монотонной функции
где
Ошибка прогнозирования при этом не превышает 10-15%, если количество предыдущих точек контроля Для прогнозирования может быть использована интерполяционная формула Ньютона. Интерполяционные полиномы в форме Ньютона удобно использовать, если точка интерполировании находится вблизи начала (прямая формула Ньютона) или конца таблицы (обратная формула Ньютона). Если узлы интерполяции равноотстоящие и упорядочены по величине, так что xi + 1 − xi = h = const, то есть xi = x 0 + ih, то интерполяционный многочлен можно записать в форме Ньютона.
где Вопрос 2. Расчет упреждающих допусков
Для многих изделий АТ контролируемые (прогнозируемые параметры имеют нормальное распределение с математическим ожиданием Значение упреждающего допуска при прочих равных условиях зависит от периодичности контроля параметров: чем больше время наработки объекта между очередными проверками, тем больше должна быть и величина упреждающего допуска. Исходным условием определения значения упреждающего допуска Расчет упреждающего допуска выполняется в следующей последовательности: 1. Определяют время наработки 2. Выбирают периодичность контроля 3. По истечении периода 4. Определяют среднеквадратическое отклонение параметра за время наработки 5. При первом контроле с наработкой 6. Выполняют контроль с наработкой 7. Используя среднеквадратическое отклонение, выбирают упреждающий допуск для заданного параметра.
35. Модель непрерывного нагружения
Процессы, характеризующие внешние условия, представляются как случайная последовательность участков, на каждом из которых Анализ процессов Основными числовыми характеристиками стационарного случайного процесса - среднее значение – математическое ожидание - центрированная случайная функция с нулевым математическим ожиданием - корреляционная функция - спектральная плотность процесса - дисперсия процесса Как показывают испытания, долговечность изделий при случайном нагружении
Для процессов изменения напряжений в силовых элементах конструкций ЛА обычно
Рис.120. Стационарный случайный процесс и его характеристики:
Скорость вертикального порыва ветра где
Все характеристики должны быть получены для всех стационарных участков типового полета и движения самолета по ВПП. В простейшем случае для полета принимаются три исходных значения При описании модели непрерывного процесса нагружения указываются вероятностные характеристики последовательности стационарных участков, каждый из которых характеризуется средним значением напряжения
Система этих участков представляет собой блок нагружения, используемый при расчете как модель нагружения в типовом полете.
Вопрос 4. Модель дискретного процесса нагружения
Доля времени, проведенного самолетом в условиях значительной турбулентности, невелика. Например, в течение 2 – 3 - часового полета среднемагистрального самолета в среднем лишь 3—5 раз пик перегрузки, вызваной вертикальными порывами, выходит за пределы
Рис.121. Диаграмма повторяемости вертикальных порывов
Различают три вида повторяемости — для грозовой, облачной ясной погоды и для каждого указывается относительная продолжительность. Для ясной погоды За модель процесса нагружений принимается детерминированный(детерминированные - динамические системы, состояние элементов которых в данный момент времени полностью определяет их состояние в любой предыдущий или следующий момент) временитиповой полет с зафиксированными продолжительностью и профилем. Типовой полет разбивается на участки Среднему значению
В дальнейших расчетах может рассматриваться, например, «жесткая» модель самолета. Тогда один порыв со скоростью
|
 принимает значения
принимает значения  , по которым построен график
, по которым построен график  (рис.123). Необходимо по известным значениям
(рис.123). Необходимо по известным значениям  , где
, где  в моменты времени
в моменты времени  в прошлом, предсказать значения
в прошлом, предсказать значения  для моментов времени
для моментов времени  в будущем.
в будущем.
 (например, 100часов), то прогнозируемый период равен
(например, 100часов), то прогнозируемый период равен  .
. алгебраическим двучленом
алгебраическим двучленом  , однако ввиду появления больших погрешностей ее практически не используют.
, однако ввиду появления больших погрешностей ее практически не используют. ее математическое представление, выраженное в виде интерполяционной формулы Лагранжа, будет иметь вид полинома порядка
ее математическое представление, выраженное в виде интерполяционной формулы Лагранжа, будет иметь вид полинома порядка  .
. ,
, - коэффициент Лагранжа, вычисляемый математически.
- коэффициент Лагранжа, вычисляемый математически. .
. .
.
 , а выражения вида Δ kyi — конечные разности.
, а выражения вида Δ kyi — конечные разности. и среднеквадратическим отклонением
и среднеквадратическим отклонением  . Эти характеристики с течением времени часто меняются и процессы изменения выходных параметров являются нестационарными. При этом, в случае неполных отказов изделий, характер процессов изменения параметров является монотонным. Для таких процессов возможен расчет упреждающих допусков, необходимых в случае технической эксплуатации до предотказового состояния.
. Эти характеристики с течением времени часто меняются и процессы изменения выходных параметров являются нестационарными. При этом, в случае неполных отказов изделий, характер процессов изменения параметров является монотонным. Для таких процессов возможен расчет упреждающих допусков, необходимых в случае технической эксплуатации до предотказового состояния. на параметр является заданная вероятность
на параметр является заданная вероятность  его выхода за границу рабочего допуска, т.е. заданная допустимая вероятность неполного отказа.
его выхода за границу рабочего допуска, т.е. заданная допустимая вероятность неполного отказа. изделия до первого профилактического контроля из условия заданной максимальной допустимой вероятности неполного отказа.
изделия до первого профилактического контроля из условия заданной максимальной допустимой вероятности неполного отказа. , исходя из условия, что
, исходя из условия, что  и округляют его до стандартного значения.
и округляют его до стандартного значения. в зоне упреждающих допусков находят параметры, которые за очередной межконтрольный период
в зоне упреждающих допусков находят параметры, которые за очередной межконтрольный период  могут выйти за пределы
могут выйти за пределы  вероятностным способом.
вероятностным способом. .
. определяют значение контролируемого параметра, сравнивают его с допустимым отклонением и определяют упреждающий допуск при
определяют значение контролируемого параметра, сравнивают его с допустимым отклонением и определяют упреждающий допуск при  .
. , сравнивают его с допустимым отклонением и упреждающим допуском при
, сравнивают его с допустимым отклонением и упреждающим допуском при  .
. и
и  являются стационарными случайными процессами (стационарный процес характеризуется независимостью среднего значения и дисперсии от времени).Самолет в этом случае рассматривается как линейная динамическая система, параметры которой рассчитываются для конструкции планера. Процессы изменения напряжений
являются стационарными случайными процессами (стационарный процес характеризуется независимостью среднего значения и дисперсии от времени).Самолет в этом случае рассматривается как линейная динамическая система, параметры которой рассчитываются для конструкции планера. Процессы изменения напряжений  в силовых элементах конструкции определяются как реакции этой системы на входные воздействия – случайные функции времени
в силовых элементах конструкции определяются как реакции этой системы на входные воздействия – случайные функции времени  и
и  .
. и
и  являются:
являются: ;
; ;
; ;
; ;
; .
. существенно зависит от параметра сложности процесса
существенно зависит от параметра сложности процесса  , определяемого как отношение средних за единицу времени чисел экстремумов
, определяемого как отношение средних за единицу времени чисел экстремумов  , и пересечений нулевого уровня
, и пересечений нулевого уровня  (рис.120):
(рис.120): .
. .
.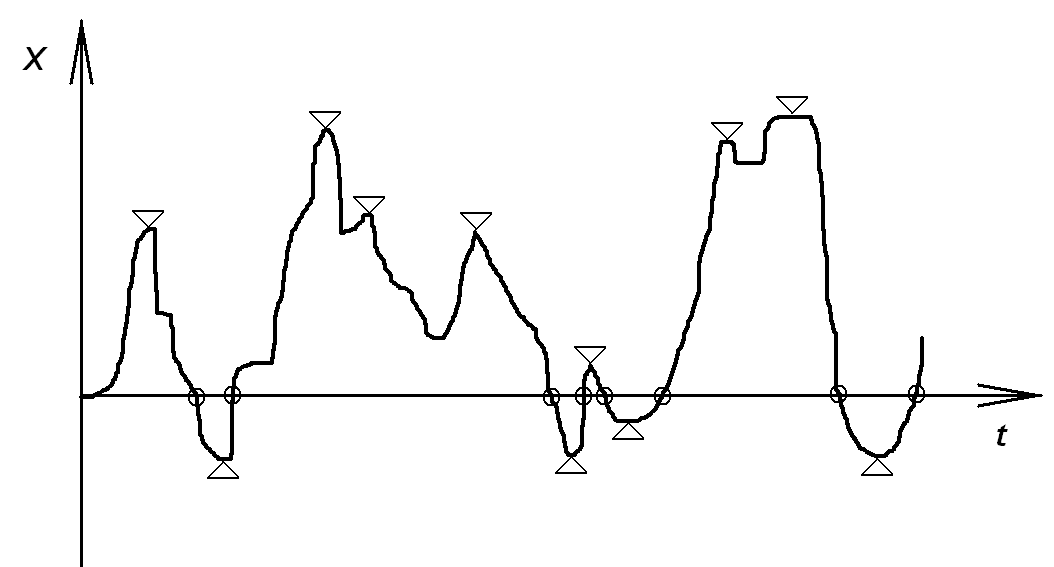
 - пересечения нулевого уровня;
- пересечения нулевого уровня;  - экстремумы
- экстремумы как случайная функция расстояния в направлении движения самолета описывается зависимостью
как случайная функция расстояния в направлении движения самолета описывается зависимостью  ,
, - круговая частота.
- круговая частота. , соответствующие грозовой, облачной и ясной (
, соответствующие грозовой, облачной и ясной ( ) погоде, и указываются доли времени для них. Для характеристики аэродрома составляются картотеки значений
) погоде, и указываются доли времени для них. Для характеристики аэродрома составляются картотеки значений  (для каждой ВПП в отдельности или осредненные по классам). Применительно к проектируемому самолету указывается частота взлетов – посадок на соответствующие ВПП.
(для каждой ВПП в отдельности или осредненные по классам). Применительно к проектируемому самолету указывается частота взлетов – посадок на соответствующие ВПП. , спектральной плотностью
, спектральной плотностью  , продолжительностью
, продолжительностью  :
: .
. . Условия дискретного нагружения описываются функцией
. Условия дискретного нагружения описываются функцией  , определяющей число порывов ветра с вертикальной скоростью
, определяющей число порывов ветра с вертикальной скоростью  , превышающей предельные порывы со скоростью
, превышающей предельные порывы со скоростью  и зависящейот высоты полета (рис. 121). При известной скорости полета
и зависящейот высоты полета (рис. 121). При известной скорости полета  повторяемость превышений, отнесенная к единице расстояния (обычно 100 км), пересчитывается в повторяемость, отнесенную к единице времени
повторяемость превышений, отнесенная к единице расстояния (обычно 100 км), пересчитывается в повторяемость, отнесенную к единице времени  , (обычно 1 ч):
, (обычно 1 ч):














 .
. , в пределах которых условия нагружения принимаются постоянными. Выделяют, например, участки полета на постоянной высоте; участки, на которых выпушена механизация (это существенно изменяет картину распределения нагрузкии на крыло и на оперение); участки, на которых выполняются маневры, и др. Для каждого выделенного участка продолжительностью
, в пределах которых условия нагружения принимаются постоянными. Выделяют, например, участки полета на постоянной высоте; участки, на которых выпушена механизация (это существенно изменяет картину распределения нагрузкии на крыло и на оперение); участки, на которых выполняются маневры, и др. Для каждого выделенного участка продолжительностью  весь диапазон скоростей порывов W разбивается на несколько интервалов j границами
весь диапазон скоростей порывов W разбивается на несколько интервалов j границами  и
и  , где
, где  .
. соответствует суммарная повторяемость всех порывов со скоростями, лежащими в этом интервале:
соответствует суммарная повторяемость всех порывов со скоростями, лежащими в этом интервале:
 и амплитудой
и амплитудой  .
.


