
Регулирование частоты вращения АД
Частота вращения ротора АД Регулирование частоты вращения изменением скольжения происходит только у нагруженного АД. В режиме холостого хода скольжение, следовательно и частота вращения ротора остаются практически неизменными. Оценку любого способа регулирования частоты вращения производят по следующим показателям: 1. Возможному диапазону регулирования; 2. Плавности регулирования; 3. Изменению КПД привода при регулировании. Регулирование частоты вращения изменением подводимого напряжения. Вращающий момент АД пропорционален Если статический момент
Регулирование скольжения этим способом возможно в пределах Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольже-ния. С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД. С уменьшением напряжения Узкий диапазон регулирования и неэкономичность ограничивают область применения этого способа регулирования частоты вращения. Регулирование частоты вращения нарушением симметрии подводимого напряжения. При нарушении симметрии трехфазной системы переменного напряжения, подводимой к АД, вращающееся магнитное поле статора становится эллиптическим. Такое поле содержит обратную составляющую (встречное поле), которая создает момент
Механические характеристики двигателя в этом случае (рис. 2.21,а) располагаются в интервале между характеристикой при симметричном напряжении (1) и характеристикой при однофазном питании (2) – пределом несимметрии трехфазного напряжения.
Рис. 2.21
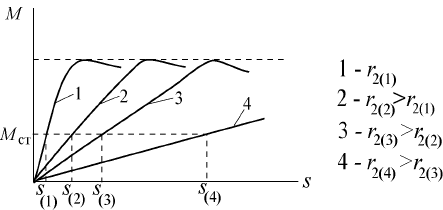
Регулировка несимметрии подводимого напряжения обеспечивается включением в одну из фаз однофазного регулировочного автотрансформатора АТ (рис. 2.21,б). Недостатками этого способа регулирования являются узкий диапазон регулирования и уменьшение КПД двигателя при увеличении несимметрии напряжения. Обычно этот способ регулирования частоты вращения применяют лишь в двигателях малой мощности. Регулирование частоты вращения изменением активного сопротивления в цепи ротора. Этот способ регулирования частоты вращения возможен лишь в АД с фазным ротором. В цепь обмотки ротора включается регулировочный реостат подобный пусковому, но рассчитанный на длительный режим работы. В зависимости от конструкции регулировочного реостата этот способ регулирования частоты вращения может быть плавным или ступенчатым. Механические характеристики АД при различных значениях активного сопротивления цепи обмотки ротора (рис. 2.22) показывают, что с увеличением активного сопротивления возрастает скольжение, соответствующее заданному статическому моменту. Частота вращения ротора при этом уменьшается.
Рис. 2.22 Способ обеспечивает регулирование частоты вращения в широком диапазоне вниз от синхронной частоты вращения. Электрические потери в цепи ротора возрастают, но только из-за потерь в регулировочном реостате. Этот способ более благоприятный по сравнению с предыдущим, несмотря на снижение КПД двигателя. Регулирование частоты вращения изменением частоты тока в обмотке статора (рис. 2.23). Это способ регулирования основан на изменении синхронной частоты вращения Чтобы регулировать частоту вращения, достаточно изменить частоту тока
Характер одновременного изменения
где
Рис. 2.24
Если частота вращения ротора АД регулируется при постоянном моменте нагрузки
При осуществлении этого закона регулирования основной магнитный поток АД при различных значениях частоты Если регулирование производится при условии постоянства мощности двигателя
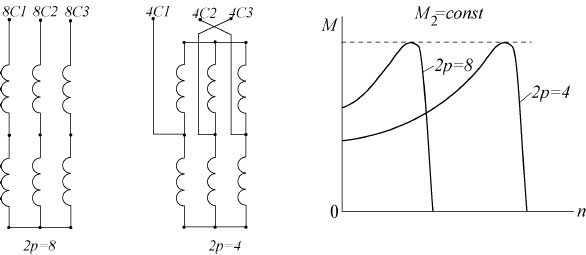
Регулирование частоты вращения изменением числа полюсов обмотки статора. Этот способ регулирования частоты вращения обеспечивает ступенчатую регулировку. Изменять число полюсов обмотки статора можно либо укладкой в пазах статора двух обмоток с разным числом полюсов, либо укладкой одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Второй способ получил наибольшее применение. Принцип преобразования четырехполюсной обмотки в двухполюсную на примере одной фазы показан на рис. 2.26: а) при последовательном согласном соединении двух катушек создаваемое ими магнитное поле образует четыре полюса; б) при последовательном встречном соединении – два полюса; в) при параллельном соединении – два полюса. АД с полюсно-переключаемыми обмотками могут работать в двух режимах: режим постоянного момента (рис. 2.27), когда при переключении обмотки статора с одной полюсности на другую вращающий момент на валу двигателя
Рис. 2.26
Рис. 2.27
режим постоянной мощности (рис. 2.28), когда при переключении обмотки статора с одной полюсности на другую мощность Регулирование частоты вращения изменением числа полюсов обмотки статора применяют только в АД с короткозамкнутым ротором, потому что в АД с фазным ротором пришлось бы и на роторе применить полюсно-переключаемую обмотку, а это привело бы к недопустимому усложнению двигателя.
Рис. 2.28
Регулирование частоты вращения введением в цепь ротора добавочной ЭДС. В цепь ротора вводят от постороннего источника добавочную ЭДС, имеющую частоту, одинаковую с основной ЭДС ротора, и направленную согласно или встречно с ней. Учитывая, что скольжение АД относительно невелико, для упрощения происходящих процессов можно принять, что Если При введении в цепь вращающегося ротора добавочной ЭДС
Рис. 2.29
С уменьшением частоты вращения ротора будут увеличиваться скольжение, ЭДС и ток в обмотке ротора. Увеличение тока в обмотке ротора и уменьшение частоты вращения ротора будут происходить до тех пор, пока этот ток при новом скольжении Аналогично можно показать, что если в цепь ротора вводится добавочная ЭДС, направленная согласно с ЭДС Таким образом, при наличии соответствующего источника (преобразователя частоты), включенного в цепь обмотки ротора, можно плавно и экономично регулировать частоту вращения ротора АД. Однако реализация этого способа требует более сложной системы управления, чем при регулировании частоты тока в обмотке статора.
|
 Из этого выражения следует, что частоту вращения ротора можно регулировать изменением какой-либо из трех величин: скольжения
Из этого выражения следует, что частоту вращения ротора можно регулировать изменением какой-либо из трех величин: скольжения  , частоты тока в обмотке статора
, частоты тока в обмотке статора  , числа полюсов обмотки статора
, числа полюсов обмотки статора 
 , поэтому механические характеристики двигателя при напряжениях меньших номинального (рис. 2.20) располагаются ниже естественной.
, поэтому механические характеристики двигателя при напряжениях меньших номинального (рис. 2.20) располагаются ниже естественной. остается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается.
остается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается. Рис. 2.20
Рис. 2.20

 двигатель утрачивает перегрузочного способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД.
двигатель утрачивает перегрузочного способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД. , направленный встречно вращающему моменту
, направленный встречно вращающему моменту  , поэтому результирующий электромагнитный момент АД уменьшается:
, поэтому результирующий электромагнитный момент АД уменьшается:

 что возможно при наличии источника питания АД с регулируемой частотой – преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне (до 12:1).
что возможно при наличии источника питания АД с регулируемой частотой – преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне (до 12:1).
 Рис. 2.23
Рис. 2.23

 и
и  - напряжение и момент при частоте
- напряжение и момент при частоте 
 и
и  - напряжение и момент при частоте
- напряжение и момент при частоте 

 то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока (рис. 2.24):
то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока (рис. 2.24):
 , то подводимое напряжение к обмотке статора следует изменять в соответствии с законом (рис. 2.25)
, то подводимое напряжение к обмотке статора следует изменять в соответствии с законом (рис. 2.25)

 остается неизменным, а мощность
остается неизменным, а мощность  изменяется пропорционально частоте вращения ротора
изменяется пропорционально частоте вращения ротора 

 остается примерно одинаковой, а момент на валу
остается примерно одинаковой, а момент на валу 



 Рассматриваем работу АД при
Рассматриваем работу АД при 
 то
то  и
и  В обмотке вращающегося ротора до введения добавочной ЭДС индуктируется ЭДС
В обмотке вращающегося ротора до введения добавочной ЭДС индуктируется ЭДС  и протекает ток
и протекает ток  создающий необходимый вращающий электромагнитный момент. Векторная диаграмма для рассматриваемой ситуации изображена на рис. 2.29,а.
создающий необходимый вращающий электромагнитный момент. Векторная диаграмма для рассматриваемой ситуации изображена на рис. 2.29,а. , направленной встречно ЭДС
, направленной встречно ЭДС  , ток в обмотке ротора в первый момент времени уменьшится. В результате вращающий электромагнитный момент
, ток в обмотке ротора в первый момент времени уменьшится. В результате вращающий электромагнитный момент  станет меньше статического момента
станет меньше статического момента  , и ротор начнет замедлять свою частоту вращения.
, и ротор начнет замедлять свою частоту вращения.
 не достигнет прежнего значения
не достигнет прежнего значения  , при котором выполнялось равенство моментов
, при котором выполнялось равенство моментов  Новому значению частоты вращения ротора соответствует векторная диаграмма на рис. 2.29,б.
Новому значению частоты вращения ротора соответствует векторная диаграмма на рис. 2.29,б. то частота вращения ротора увеличивается.
то частота вращения ротора увеличивается.


