Система автоматического регулирования угловой скорости электродвигателя постоянного тока.
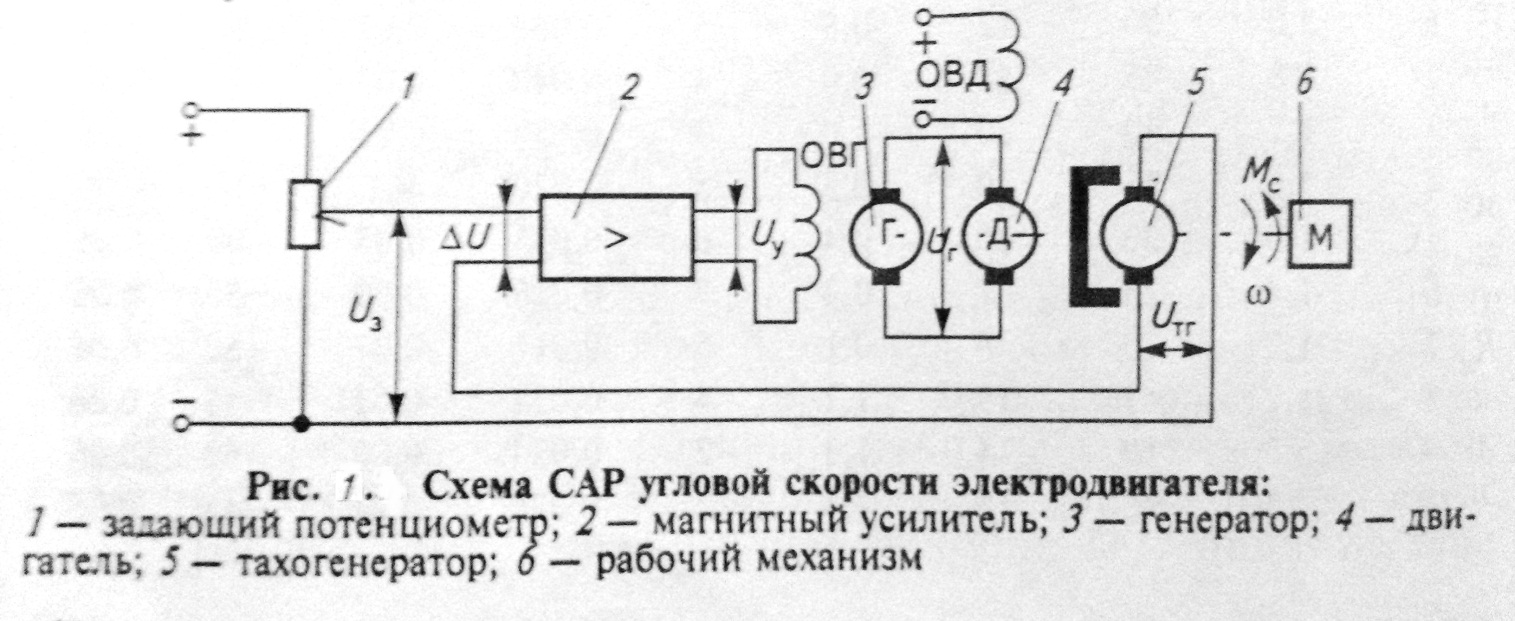
Система САР, приведенная на рисунке 1, обеспечивает стабилизацию угловой скорости электродвигателя постоянного тока, который совместно с рабочим механизмом является объектом регулирования. Регулируемая величина объекта – угловая скорость двигателя ω, регулирующее воздействие – напряжение UГ, подаваемое от генератора на якорь двигателя. Возмущающее воздействие на объекте регулирования – момент сопротивления МС, создаваемый рабочим механизмом. Угловая скорость двигателя ω контролируется тахогенератором, сигнал которого UТГ, пропорциональный скорости, сравнивается с задающим сигналом UЗ. Сигнал рассогласования ΔU = UЗ – UТГ усиливается магнитным усилителем и воздействует на обмотку возбуждения генератора, выполняющего функции исполнительного органа (элемента). Динамические свойства объекта регулирования и элементов САР описывается следующими уравнениями:
Таблица 1. Значение параметров элементов САР.
|