
Лобовая осевая проходка с односторонней и двусторонней погрузкой грунта в транспортные средства.
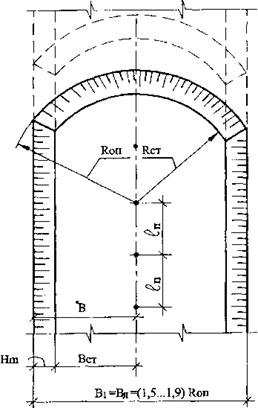
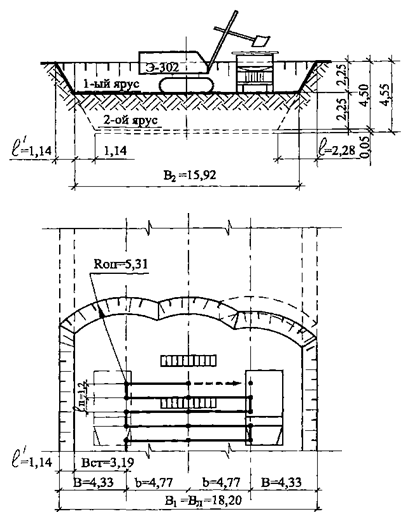
При проектировании забоя лобовой проходки с двусторонней погрузкой грунта (рисунок 7) сначала определяют значение половины ширины проходки
где В1- ширина котлована по верху. Затем определяют половину ширины проходки по низу забоя (на уровне стоянки экскаватора) по формуле
где В – ширина половины проходки по верху забоя; Н – глубина котлована; m – коэффициент заложения откоса котлована, принятый при определении объема котлована.
Рисунок 7 – Схема проходки экскаватора при двусторонней погрузке грунта Длину рабочей передвижки экскаватора принимают по таблице 23. Радиус резания на уровне стоянки экскаватора определяют по формуле
где Roп – оптимальный практический радиус резания; l – заложение рабочего откоса. При проектировании забоя лобовой проходки с односторонней погрузкой грунта (рисунок 4а) необходимо ось пути экскаватора удалить от подошвы ближайшего откоса на расстояние, обеспечивающее поворот экскаватора с соблюдением расстояния между кабиной и забоем не менее 1 м. Таблица 23 – Рекомендуемая длина передвижки экскаватора
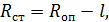
Примечание. Длина передвижки экскаватора, оборудованного драглайном, при продольной разработке не может быть больше, чем половина длины стрелы, а при поперечной разработке - не более 1/3 длины стрелы драглайна. 2. Лобовая уширенная проходка с перемещением экскаватора по зигзагу (рисунок 8). Сначала задаются расстоянием между осями стоянок экскаватора b=(0,3...0,8)Rоп, а затем определяют расстояние от стоянки экскаватора до бровки откоса по формуле
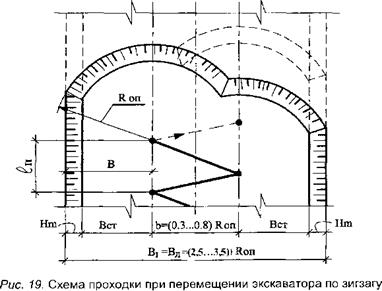
где В1 – ширина котлована по верху; b – принятое расстояние между осями стоянок экскаватора. Далее определяют значения Вст и Rcт по формулам (31) и (32). Если при вычерчивании масштабной схемы проходки экскаватора выяснится, что при рассчитанном значении Вст гусеницы (колеса) экскаватора расположены на близком расстоянии от подошвы бокового и рабочего откосов, что исключает свободное перемещение экскаватора или транспортных средств, или расстояние до подошвы рабочего откоса меньше минимального радиуса копания экскаватора на уровне стоянки, то необходимо уменьшить расстояние между продольными осями стоянок экскаватора (b). 3. Лобовая уширенная проходкас перемещением экскаватора поперек котлована (рисунки 9, 10). Сначала задаются расстоянием между осями стоянок экскаватора b=(0,8...0,9)Rоп, а затем определяют расстояние от стоянки экскаватора до бровки откоса по формуле
где В1 – ширина котлована по верху; b – принятое расстояние между осями стоянок экскаватора. Далее определяют значения Вcт и Rст по формулам (31) и (32). Рассчитанные и принятые параметры проходок экскаватора используют при вычерчивании масштабных схем проходок экскаватора и разработки котлована в целом (рисунок 6). Если при вычерчивании масштабной схемы проходки экскаватора (рисунки 8, 9, 11) выяснится, что принятое удаление продольной оси стоянок экскаватора от подошвы ближайшего бокового откоса не обеспечивает поворот экскаватора с соблюдением расстояния между кабиной и забоем не менее 1 м или расстояние от стоянки экскаватора до подошвы ближайшего рабочего откоса меньше минимального радиуса копания экскаватора на уровне стоянки, то рассматриваются варианты уменьшения b, увеличения Rоп (при малых объемах работы) или уменьшения высоты экскаваторного забоя (яруса котлована).
Рисунок 8 – Схема проходки при перемещении экскаватора по зигзагу
Рисунок 9 – Схема проходки при перемещении экскаватора поперек котлована
Рисунок 10 –Схема проходки при перемещении экскаватора поперек котлована
Рисунок 11 – Схема забоя при боковой проходке экскаватора
4. Боковая проходка (рисунок 11). Сначала определяют расстояние от места стоянки экскаватора до бровки откоса по формуле
где Ron – оптимальный радиус резания, lп – длина рабочей передвижки экскаватора (таблица 23). Ширину боковой проходки определяют по формуле
где Rст.min – минимальный радиус копания на уровне стоянки экскаватора [2, 6]. В пунктах 1, 2 и 3 определены параметры забоя проходок для
для лобовой осевой
для лобовой уширенной зигзагообразной
для лобовой уширенной поперечной
где Ron – оптимальный радиус резания экскаватора; lп – длина рабочей передвижки экскаватора; Rcт. min – смотри формулу (36); n – количество поперечных передвижек экскаватора.
|
 (30)
(30) (31)
(31)
 (32)
(32) (33)
(33) (34)
(34)

 (35)
(35) (36)
(36) (37)
(37) (38)
(38) (39)
(39)


