Проектирование схемы разработки котлована, траншеи и экскаваторного забоя
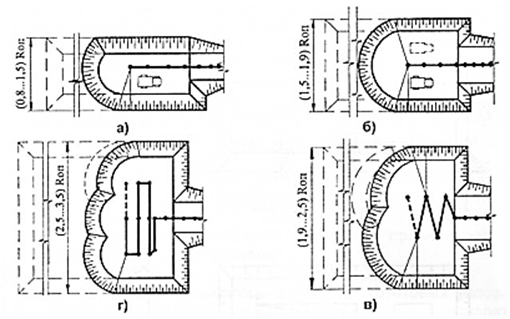
4.1 Выбор схемы разработки котлована В технических характеристиках экскаваторов всех марок приведены, как правило, максимальные показатели: радиусы копания, выгрузки, высота выгрузки и др. Работа на максимальных для данной машины параметрах приводит к ее быстрому износу и, как следствие, к снижению производительности. Поэтому для производства земляных работ следует принимать оптимальные рабочие параметры, составляющие 0,9 максимальных паспортных данных. Схему разработки котлована выбирают по величине отношения ширины котлована по верху (В1) к оптимальному практическому радиусу резания (Ron) экскаватора, который принимается равным 0,9 наибольшего паспортного радиуса копания (технические характеристики экскаваторов, приложение 2). На основании полученного значения В1/Roп и рекомендованных схем экскаваторных проходок (рисунки 4, 5) выбирают схему разработки котлована. Широкие котлованы разрабатывают сначала лобовой проходкой, а затем – боковыми. Для маневренных экскаваторов малых моделей (с вместимостью ковша 0,25...0,65 м3) движение по зигзагу или поперек котлована (рисунок 4 в, г) не представляет трудности, поэтому наибольшая ширина лобовой проходки соответственно равна 2,5Rоп или 3,5 Ron. Для экскаваторов с вместимостью ковша более 0,65 м3 выбирают лобовую проходку с односторонней или двусторонней погрузкой грунта в транспортные средства (рисунок 4 а, б), то есть наибольшая ширина лобовой проходки соответственно равна 1,5Ron или 1,9 Ron. В зависимости от высоты (глубины) котлована выбранная схема может быть применена для разработки первого яруса котлована или для разработки котлована в целом. После определения схемы разработки котлована необходимо рассчитать размеры экскаваторного забоя для лобовой и боковой проходок. При вычерчивании схемы разработки котлована обозначаются участки котлована, которые разрабатываются лобовой проходкой и боковыми проходками, границы боковых проходок, номера проходок и путь движения экскаватора и транспортных средств (рисунок 6).
а – с односторонней погрузкой грунта в транспортные средства, б – с двусторонней погрузкой грунта в транспортные средства, в – уширенной проходкой с перемещением экскаватора по зигзагу, г – уширенной проходкой с перемещением экскаватора поперек котлована
Рисунок 4 - Схема разработки котлована прямой лопатой лобовыми проходками
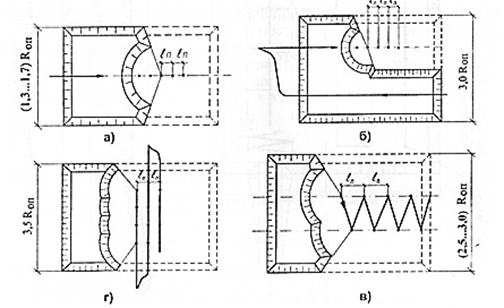
а – симметричная лобовая проходка, б– две лобовые проходки, в – лобовая проходка с продольным перемещением экскаватора зигзагом, г – уширенная лобовая проходка с поперечно-торцовым перемещением экскаватора
Рисунок 5 – Схемы разработки котлована обратной лопатой и драглайном Количество боковых проходок определяют делением ширины участка для боковых проходок на ширину одной боковой проходки. При этом нецелое количество проходок целесообразно округлить в сторону увеличения, так как в этом случае уменьшается угол поворота стрелы экскаватора и, как следствие, повышается производительность экскаватора. После уточнения количества боковых проходок определяют новую ширину боковой проходки и корректируют параметры бокового забоя экскаватора. Параметры забоя зависят от схемы разработки котлована. Последовательность расчета параметров приведена далее.
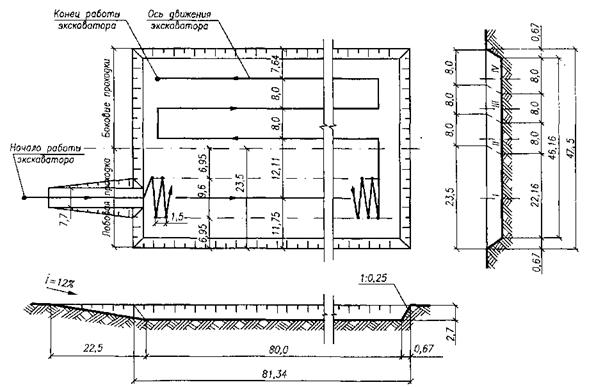
I – лобовая проходка; II…IV – боковые проходки
Рисунок 6 – Схема разработки котлована экскаватором с прямой лопатой
|