ПЕРСПЕКТИВНЫЙ МЕТОД РЕГИСТРАЦИИ ПОВРЕЖДЕНИЙ ЭЛЕМЕНТОВ ПРОТОЧНОЙ ЧАСТИ АВИАЦИОННЫХ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ СЕМЕЙСТВА CFM56
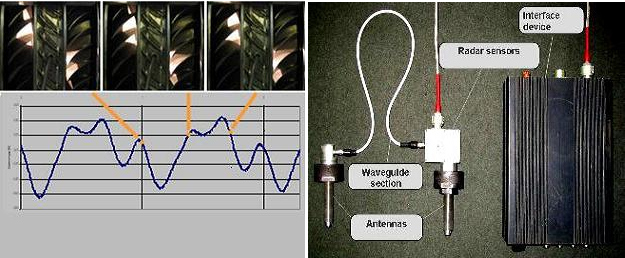
Одним из непременных условий реализации перспективных методов технического обслуживания газотурбинных двигателей является широкое использование совокупности различных методов и средств технической диагностики, которые должны обеспечить обнаружение дефектов на ранней стадии их развития для обеспечения своевременного проведения ремонтных работ и недопущения аварии [19]. Подавляющее большинство дефектов проточной части ГТД характеризуется изменением геометрических характеристик отдельных элементов (обрыв, разрушение, трещины, забоины, нагар, эрозивный и абразивный износ, искривление роторных и статорных лопаток, прогар камеры сгорания и пр.) или их кинематических параметров (помпажные явления, возрастание уровня колебаний лопаток, изменение параметров вибрации, биение вала ротора, неравномерность вращения и др.). Для оценки состояния элементов проточной части наиболее широко используются неконтактные и виброакустические средства, которые, несмотря на свои очевидные преимущества, не в полной мере обеспечивают достоверный оперативный контроль элементов ГТД. Одним из факторов, сдерживающих применение названных систем на «горячих» частях двигателя, является ограниченный диапазон рабочих температур их первичных датчиков. В последние годы получил развитие метод контроля состояния и диагностики ГТД, основанный на использовании радиолокационных измерений, который обеспечивает автоматический контроль состояния подвижных элементов в процессе функционирования ГТД без проведения сборочно-разборочных работ. Независимо от назначения радиолокационных систем, принцип их действия основан на излучении электромагнитных колебаний частотой от 3 до 40 ГГц в направлении движущихся элементов ГТД и приеме сигнала, сформированного в результате отражений от диагностируемых элементов и их окружения. Вращение ротора приводит к постоянному изменению положения роторных лопаток относительно антенн и возникновению сигнала, обусловленного параметрами поля вблизи приемной антенны (рис. 45). Параметры этого поля зависят от движения роторных лопаток, а также от их формы, линейных размеров, отражающих свойств и положения относительно излучающей и приемной антенн.
Рис. 45. Принцип формирования сигнала и состав радиолокационной системы В общем случае в состав радиолокационной измерительной системы могут входить (рис. 45): антенны, линии передачи сигналов, приемо-передатчик СВЧ сигналов (радар), а также блок управления, питания и обработки. В зависимости от назначения радиолокационных систем, могут быть определены относительные или абсолютные параметры движения облучаемых элементов, например, роторных лопаток (частота вращения или колебания, изменение периодичности и скорости движения и пр.) и (или) определен факт изменения их формы, размеров или положения (износ, разрушение, коробление, нагар, изменение радиального зазора и пр.). Наилучшие результаты могут быть получены при оптимизации конструкции радара, его структурной схемы, методов выделения полезной информации из принимаемых сигналов и алгоритмов их обработки для решения конкретной контрольной или измерительной задачи на конкретном типе двигателя. Однако, во многих случаях возможно использование одного и того же микроволнового датчика для решения различных задач. Например, при расположении антенны в районе первой ступени компрессора возможно определение частоты вращения ротора, его углового положения, радиальных зазоров и параметров колебания роторных лопаток. Далее приводятся краткие результаты, полученные в разное время ООО «Радарные технологии – 2Т» в натурных условиях при использовании микроволновых датчиков для определения факта повреждения роторных лопаток, определения частот вращения роторов двухвального двигателя, вибрации статичных и вращающихся роторных лопаток, а также определения прохождения через проточную часть посторонних предметов.
|