Предназначены для выдачи потребителям электрических сигналов, пропорциональных углам крена и тангажа. В этом приборе реализуется так называемая силовая гиростабилизация платформы. Платформа установлена в кардановом подвесе, выставляется вначале по вертикали и удерживается в этом положении с помощью двух двигателей. Двигатели управляются двумя двухстепенными гироскопами, которые вращаются в разные стороны. При появлении любого внешнего момента, который пытается вывести платформу из вертикального положения, соответствующий гироскоп прецессирует и перемещает скользящий контакт потенциометра, что формирует таким образом электрическое напряжение, поступающее на двигатель. Двигатель создает момент, равный по величине и противоположный направлению внешнего момента. Осуществляется также коррекция вертикали с помощью жидкостного маятника. С помощью него обеспечивается также начальное арретирование. На осях карданного подвеса установлены потенциометрические датчики, которые выдают напряжения, пропорциональные углам крена и тангажа, на индикаторы, в автопилот и другие потребители.
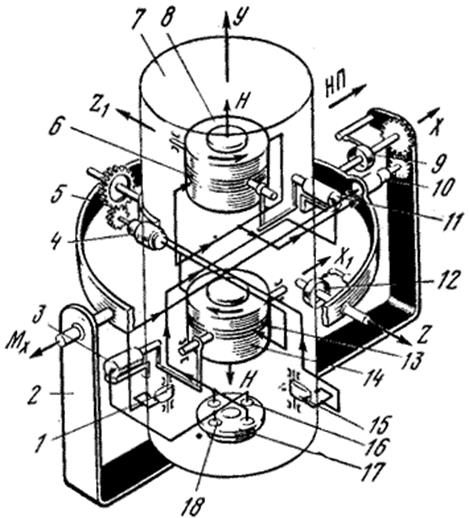
Рис. 35 Кинематическая схема центральной гировертикали
1, 15 - маятники; 2 - корпус; 3, 4, 10, 11 - электродвигатели; 5 - рамка; 6, 9, 12, 13 - потенциометры; 7 - платформа; 8, 14 - гироскопы; 16, 18 - контакты; 17 - маятник




