
Частотные характеристики цифровых фильтров.
Передаточная характеристика аналогового фильтра является частотно-зависимым коэффициентом пропорциональности между спектром сигнала на выходе фильтра
Для анализа аналоговых фильтров в качестве входного сигнала обычно используют обобщенный гармонический сигнал Между частотной характеристикой фильтра К(ω) и его системной функцией H(z) имеется простая связь:
Следует отметить, что частотные характеристики цифровых фильтров являются периодическими функциями частоты с периодом повторения, равным частоте дискретизации сигнала ωД=2π/Т, где Т — шаг дискретизации ЦФ. По этой причине перед цифровой обработкой обычно ограничивают полосу частот аналоговых сигналов специальными фильтрами нижних частот, что уменьшает негативные проявления частотных искажений дискретизации - наложения частот (алайзинг). Сглаживание и численное дифференцирование. С помощью одних алгоритмов цифровой фильтрации возможно сглаживание сигналов, с помощью других - численное дифференцирование этих сигналов [4]. Однако существуют такие алгоритмы цифровой фильтрации, которые позволяют совместить в едином алгоритме операции сглаживания и дифференцирования. Рассмотрим более подробно один из таких алгоритмов, который реализуется нерекурсивным цифровым фильтром. Входная последовательность {x(kT}} аппроксимируется для каждого из пяти последовательных отсчетов сигнала (рис. 5) с абсциссами k = -2, -1, 0, 1, 2 полиномом p2(t) второго порядка (параболой): P2(t) = A + Bt + Ct2. (6)
Рис. 5. Пятиточечный алгоритм цифровой фильтрации.
Неизвестные коэффициенты полинома А, В и С определяют для каждых пяти отсчетов входных данных из условия, что парабола (6) аппроксимирует входную последовательность методом наименьших квадратов. Качество аппроксимации оценивают суммарной квадратичной ошибкой ε, которая является функцией коэффициентов полинома А, В и С (преобразование абсцисс вида t' = t/Т позволяет перейти к единичному шагу дискретизации, но при вычислении производных следует учесть изменение масштаба времени коэффициентом 1/7):
Условие min ε(A, В, С) можно также представить в виде системы уравнений, которую называют нормальной системой уравнений метода наименьших квадратов:
Эта система линейных уравнений после дифференцирования выражения для ε в развернутом виде с применением упрощенного вида записи операции суммирования {1}∙А + {k}∙В + {k2}∙C = {s(k)}, {k}∙А + {k2}∙В + {k3}∙C = {k∙ s(k)}, {k2}∙А + {k3) ∙В + {k4}∙С = {к2∙s(k)}.
Для решения системы уравнений полезно заметить, что для k = -2, -1, 0, 1, 2: {1} = 5, { k2}=10, { k4}=34 а все суммы нечетных степеней к равны нулю. Тогда система существенно упрощается:
5∙А + 10∙C = {s(k)}, 10∙В = {k∙ s(k)}, 10∙А + 34∙С = {к2∙s(k)}.
Решая систему относительно коэффициентов А, В и сохраняя только центральную (k=0) точку параболы, в качестве выходного значения получаем
Выходная последовательность при этом подобна входной последовательности, но содержит меньше высокочастотных помех, так как параболическая аппроксимация обеспечивает некоторое сглаживание входной последовательности. Определяя производную со сглаживанием, с учетом масштабного коэффициента преобразования координат получим
Подставляя выражение (7) в выражение (9) и применяя к результату Z-преобразование, получаем системную функцию сглаживающего фильтра:
т. е. имеем нерекурсивный фильтр нижних частот. В соответствии с формулой (5) частотная характеристика такого фильтра имеет вид
Частотная характеристика сглаживающего фильтра показана на рис. 6.
Рис. 6. Частотная характеристика сглаживающего цифрового фильтра.
Теперь найдем первую производную для функции (6):
Но для В справедливо соотношение (9). Тогда окончательно получаем
Поэтому системная функция и частотная характеристика имеют вид
Этот фильтр аппроксимирует идеальную производную на низких частотах не так хорошо, как другие, однако его усиление не является функцией периода дискретизации Т, как у фильтров, аппроксимирующих по двум и трем точкам. Рассматривая движущуюся систему координат с окном из пяти точек, мы продолжаем аналогичным образом получать новые сглаженные значения выходного сигнала цифрового фильтра и определять устойчивую к действию высокочастотных помех производную входного сигнала.
|
 и спектром входного сигнала
и спектром входного сигнала  :
:
 , тогда выходной сигнал имеет вид
, тогда выходной сигнал имеет вид  . Для определения частотной характеристики ЦФ на его вход подают дискретизированный обобщенный гармонический сигнал
. Для определения частотной характеристики ЦФ на его вход подают дискретизированный обобщенный гармонический сигнал  , тогда сигнал на выходе имеет вид
, тогда сигнал на выходе имеет вид  .
. .(5)
.(5)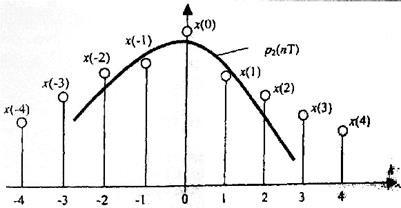

 = {s(k)} выглядит следующим образом:
= {s(k)} выглядит следующим образом: (7)
(7) . (8)
. (8) (9)
(9)
 . (9)
. (9)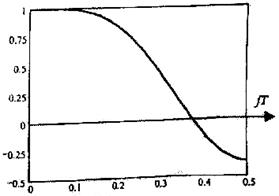

 (10)
(10)



