Операции с нечеткими множествами
К нечетким множествам можно применять следующие операции:
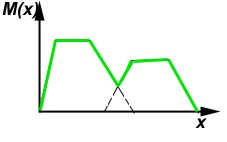
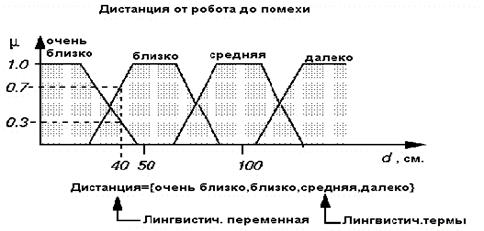
Пример В нечеткой логике вводится понятие лингвистической переменной, значениями которой являются не числа, а слова естественного языка, называемые термами. Например, в случае управления мобильным роботом можно ввести две лингвистические переменные: ДИСТАНЦИЯ (расстояние до помехи) и НАПРАВЛЕНИЕ (угол между продольной осью робота и направлением на помеху). Рассмотрим лингвистическую переменную ДИСТАНЦИЯ. Значениями ее можно определить термыДАЛЕКО, СРЕДНЯЯ, БЛИЗКО и ОЧЕНЬ БЛИЗКО.Для физической реализации лингвистической переменной необходимо определить точные физические значения термов этой переменной. Пусть переменная ДИСТАНЦИЯ может принимать любое значение из диапазона от нуля до бесконечности. Согласно положениям теории нечетких множеств, в таком случае каждому значению расстояния из указанного диапазона может быть поставлено в соответствие некоторое число от нуля до единицы, которое определяет степень принадлежности данного физического расстояния (допустим 40 см) к тому или иному терму лингвистической переменнойДИСТАНЦИЯ Степень принадлежности определяется так называемой функцией принадлежности М(d), где d-расстояние до помехи. В нашем случае расстоянию 40 см. можно задать степень принадлежности к терму ОЧЕНЬ БЛИЗКО равную 0,7, а к терму БЛИЗКО– 0,3 (см. рис.1.). Конкретное определение степени принадлежности может проходить только при работе с экспертами.
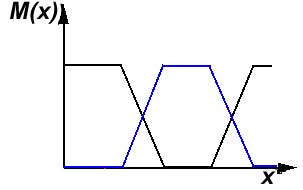
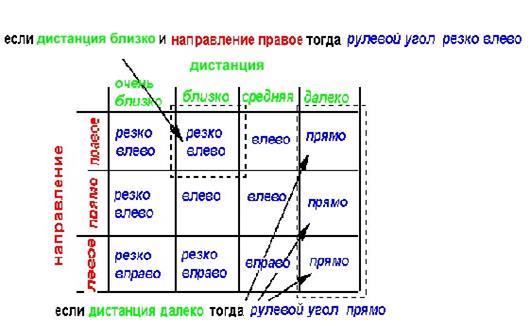
ПеременнойНАПРАВЛЕНИЕ, которая может принимать значения в диапазоне от 0 до 360 градусов, зададим термыЛЕВОЕ, ПРЯМО И ПРАВОЕ. Теперь необходимо задать выходные переменные. В рассматриваемом примере достаточно одной, которая будет называться РУЛЕВОЙ УГОЛ. Она может содержать термы: РЕЗКО ВЛЕВО, ВЛЕВО, ПРЯМО, ВПРАВО, РЕЗКО ВПРАВО. Связь между входом и выходом запоминается в таблице нечетких правил (рис.2.).
Каждая запись в данной таблице соответствует своему нечеткому правилу, например: Если ДИСТАНЦИЯ БЛИЗКО и НАПРАВЛЕНИЕ ПРАВОЕ, тогда РУЛЕВОЙ УГОЛ РЕЗКО ВЛЕВО Таким образом, мобильный робот с нечеткой логикой будет работать по следующему принципу: данные с сенсоров о расстоянии до помехи и направлении на нее будут фаззифицированы, обработаны согласно табличным правилам, дефаззифицированы и полученные данные в виде управляющих сигналов поступят на привода робота.
|