Постановка задач и последовательность выполнения лабораторной работы
В лабораторной работе рассматривается применение ПЛК для автоматизации одной из задач, типичных для промышленных производств.
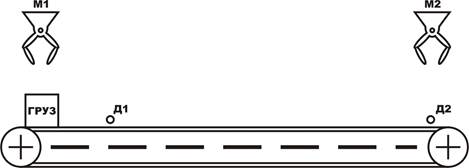
Задача автоматизации цеховой транспортной системы (рисунок 2) характерна для большинства предприятий, выполняющих операции упаковки либо приема и сортировки различных грузов.
Рисунок 2 – Схема линии транспортировки
Конвейер осуществляет перемещение груза. Для установки и снятия груза используются манипуляторы. Скорость конвейера фиксированная. Используемые в системе сигналы и их характер (импульсный или постоянный) показаны на рисунке 3. После включения питания система должна сформировать для манипулятора М1 команду разрешения на установку груза. После получения сигнала подтверждения «груз установлен» должен быть включен двигатель конвейера. При срабатывании датчика Д1 (груз в безопасной позиции) необходимо остановить конвейер и, после чего выполнить установку нового груза. Это обеспечит размещение груза на транспортере максимально плотно. Цикл повторяется до тех пор пока не сработает датчик конечного положения Д2 (позиция выгрузки). По срабатыванию датчика Д2 необходимо сформировать команду на манипулятор M2 «забрать груз». Факт того, что груз снят отслеживается по состоянию датчика Д2. Дальнейшая работа конвейера должна осуществляться аналогично.
Рисунок 3 – Сигналы СУ поточной линией
Все сигналы системы дискретные и представляют собой лишь разрешение/подтверждение работы подчиненных модулей (манипуляторы, двигатели). При решении этой задачи требуемые значения времени разгона/торможения двигателя конвейера задаются параметрами частотного преобразователя. После разработки и отладки программы для ПЛК, реализующей заданный алгоритм работы конвейера, выполните ее модификацию с целью обеспечения необходимого закона управления скоростью конвейера.
Диаграмма изменения скорости двигателя при разгоне-торможении приведена на диаграмме, представленной на рисунке 4.
Рисунок 4 – Диаграмма изменения скорости двигателя.
Управляющие сигналы и сигналы датчиков остаются прежними. По поступлению сигнала Stop необходимо обеспечить максимально быструю остановку двигателя. После снятия сигнала Stop система должна оставаться в состоянии покоя до поступления нового разрешающего сигнала Start. Время разгона Т1 и время торможения T2 в общем случае не равны.
Для лучшего понимания процесса программирования рекомендуется сначала реализовать треугольную функцию управления скоростью конвейера с одинаковым временем разгона и торможения (рисунок 5).
Рисунок 5 – Треугольная функция разгона/торможения
В процессе выполнения работы необходимо: а) ознакомиться с пакетом Alpha Programming, б) разработать алгоритм решения поставленных задач, в) разработать программы на языке FBD (реализующие первую и вторую задачи управления), г) при участии преподавателя или инженера, записать программу в контроллер и проверить ее работоспособность.
Содержание отчета
Лабораторная работа может считаться выполненной успешно при наличии оформленного протокола (отчета), практической реализации заданных алгоритмов управления, умении выполнять изменение параметров преобразователя частоты и управлять им в «ручном» режиме и в режиме внешнего управления, умении разрабатывать и отлаживать программы для ПЛК в среде Alpha Programming, а так же записывать их в контроллер.
Протокол лабораторной работы должен содержать следующие разделы: 1. Цель работы. 2. Схема управляемой системы, с указанием сигналов и входов/выходов контроллера. 3. Алгоритм решения поставленных задач. 4. Описание концепции решения и основных используемых элементов (кратко). 5. Выводы по работе.
Контрольные вопросы.
1. Приведите назначение, области применения и основные характеристики ПЛК Alpha. 2. Поясните способы управления частотным преобразователем от контроллера Alpha. 3. Обоснуйте Ваши алгоритмические решения, обеспечивающие корректность продолжения работы системы управления после получения сигнала «Стоп». 4. Перечислите основные режимы работы среды разработки Alpha Programming. 5. Укажите имеющиеся способы оперативного управления работой контроллера Alpha.
Вопросы для допуска к лабораторной работе. Студент допускается к выполнению лабораторной работы только в случае успешного ответа на следующие вопросы. В противном случае выполнение лабораторной работы переносится.
1. Поясните различие между дискретными и аналоговыми сигналами. 2. Поясните понятия переднего и заднего фронтов сигнала. 3. Приведите таблицы истинности для дискретных логических элементов «И», «ИЛИ», «НЕ».
|