Силовой баланс автомобиля.
Сила тяги на ведущих колесах расходуется на преодоление сил сопротивления дороги, воздуха и инерции. Уравнение движения автомобиля решают, приближенно используя графоаналитические методы. Наибольшее распространение получили методы Уравнение силового баланса имеет вид: P т = Р д +P в + P и, Н, (2.5) где P т – тяговая сила на ведущих колесах автомобиля, Н; Р д – сила сопротивления дороги, Н; P в – сила сопротивления воздуха, Н; P и – приведенная сила инерции, Н. Сила сопротивления дороги Pд = Gaψ (2.6) где ψ – коэффициент сопротивления дороги; Ga – вес автомобиля Н. Коэффициент сопротивления дороги характеризует дорогу в общем случае: ψ = f cosα + sin α. При малых углах подъема (не превышающих 5º), характерных для большинства автомобильных дорог с твердым покрытием, коэффициент сопротивления дороги ψ = f + i. (2.7) где f – коэффициент сопротивления качению колес; i – уклон дороги. Коэффициент f сопротивления качению колес растет с увеличением скорости движения автомобиля, его определяют как
где f 0 - коэффициент сопротивления качению колес при скорости V < 20 км/ч.; V – скорость автомобиля,м/с. Значения f 0 для различных типов дорожного покрытия приведены в задании. Уклон дороги i = tg(α) (2.9) где α - угон уклона дороги.
Сила сопротивления воздуха Силу сопротивления воздуха определяется из выражения Рв= kвFаV2 (2.10) где kв - коэффициент лобового сопротивления автомобиля, зависящий от его формы, Нс2/м4; Fa - лобовая площадь автомобиля, м2; V – скорость автомобиля,м/с. На практике лобовую площадь определяют по эмпирическим формулам, дающим небольшую погрешность: F = BH - для грузовых автомобилей и автобусов; F =0,78Bл Н - для легковых автомобилей, где H - наибольшая высота автомобиля, м; В - колея грузового автомобиля и автобуса, м; Bл - наибольшая ширина легкового автомобиля, м Приведенная к колесам автомобиля сила инерции (Ри). При установившемся прямолинейном движении автомобиля j =0. Следовательно Pи = 0.
Суммарное сопротивление движению автомобиля: PΣ = Pд + Рв. Подставляя в (2.8) и (2.10) значения скорости V, рассчитывают Pд, Рв и PΣ (таблица 2.4).
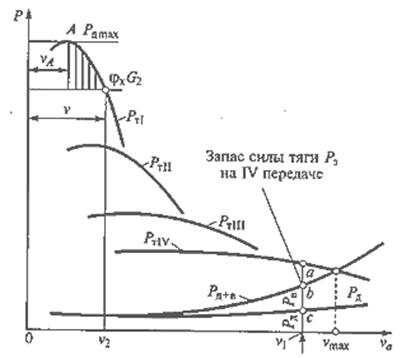
Пo полученным значениям Pд, Pв и PΣ на тяговой характеристике Pт(V) строится зависимость Pд (V), Рв (V), PΣ(V) (рисунок 2.1). В нижней части графика наносят кривую Рд построенную для одного значения коэффициента сопротивления дороги ψ. При помощи полученного графика силового баланса можно определить основные показатели динамичности автомобиля при движении. График РΣ(V) определяет величину тяговой силы необходимой для равномерного движения автомобиля в заданных дорожных условиях.
Рис.2.1 Тяговый баланс автомобиля Если кривая Pт проходит выше кривой Pд + Рв то отрезки, заключенные между этими кривыми, представляют собой нереализованную часть («запас») Pз силы тяги, которую можно использовать для преодоления повышенного сопротивления дороги или для разгона автомобиля. Если Pт < PΣ, автомобиль движется с замедлением. Максимальную скорость Vmax движения автомобиля можно определить из Возможность движения автомобиля может быть ограничена буксованием ведущих колес. Автомобиль движется без буксования, если сила тяги на ведущих колесах меньше, чем сила их сцепления с дорогой, т.е.: Рт < Рсц Если Рт>Рсц, ведущие колеса будут пробуксовывать. Силу Pсц сцепления ведущих колес при движении автомобиля по горизонтальной дороге можно определить как Pсц = Gсц φ (2.11) где Gсц - сцепной вес автомобиля, φ- коэффициент продольного сцепления колеса с дорогой. Для автомобиля колесной формулы 4x2, 6x4 Gсц - часть веса Ga автомобиля, Значения коэффициента φ даны в задании.
По изученному материалу и полученным данным составить отчет, который должен содержать: 1.Дату выполнения работы; 2.Тему и цель работы; 3. Ф.И.О. студента и группа; 4. Необходимые исходные данные согласно варианту задания; 5. Краткие теоретические положения и пояснения к расчетам; 6. Сводную таблицу; 7. Скоростную характеристику; 8. Вывод.
Варианты задания на практическую работу.
|
 (2.8)
(2.8)