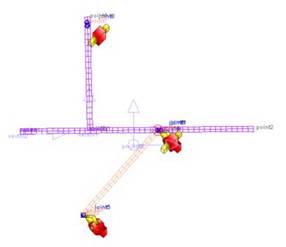
Схема работы механизма
Текст программы: point point1=point(-8.6000e-001 [ m ], 8.0000e-002 [ m ], 0.0000e+000 [ m ]); point point2=point(9.1000e-001 [ m ], 1.0000e-001 [ m ], 0.0000e+000 [ m ]); color color3=index(67); solid solid1=cylinder(point1, point2, 0.02 [ m ], mass = 4 [ kg ], color = color3); point point3=point(-3.3000e-001 [ m ], 9.0000e-002 [ m ], 0.0000e+000 [ m ]); point point4=point(-3.5000e-001 [ m ], 9.5000e-001 [ m ], 0.0000e+000 [ m ]); color color2=index(67); solid solid2=cylinder(point3, point4, 0.02 [ m ], mass = 3 [ kg ], color = color2); body body1=body(color = RGB(229, 229, 229)); body body1 < (solid2, solid1); point point5=point(-3.8000e-001 [ m ], -5.3000e-001 [ m ], 0.0000e+000 [ m ]); point point6=point(2.1000e-001 [ m ], 9.0000e-002 [ m ], 0.0000e+000 [ m ]); solid solid3=cylinder(point5, point6, 0.02 [ m ], mass = 3 [ kg ]); point point7=point(-3.5000e-001 [ m ], 9.1000e-001 [ m ], 0.0000e+000 [ m ]); body body2=body(color = RGB(255, 153, 153)); set ground = body2; body body2 < (point5, point7); body body3=body(color = RGB(255, 153, 102)); body body3 < (solid3); joint joint5=rotational(body3, body2, point5, projectZ); point point8=point(2.1000e-001 [ m ], 9.0000e-002 [ m ], 0.0000e+000 [ m ]); color color4=index(15); solid solid4=sphere(point8, 0.04 [ m ], mass = 2 [ kg ], color = color4); body body5=body(color = RGB(204, 255, 102)); body body5 < (solid4); joint joint6=rotational(body3, body5, point8, projectZ); vector vector1=vectorPP(point3, point4); joint joint8=translational(body1, body2, point7, vector1); vector vector2=vectorPP(point1, point2); joint joint1=translational(body1, body5, point8, vector2); condition condition1=rotVelocity(body2, projectZ, body3, -0.3 [ rad/ s ]);
/\/////////////////////////////////////////////////////////////////////////////////// /\ Единицы измерения; set units = SI; Балтийский Государственный Технический Университет «Военмех» им. Д.Ф.Устинова.
Лабораторная работа № 1 «Исследование кривошипно-кулисного механизма с поступательно движущейся кулисой»
Выполнил: Студент группы ВЕ-187
Санкт-Петербург 2011 г. Цель работы: Создание модели кривошипно-кулисного механизма с поступательно движущейся кулисой в программе Euler 8.13 и исследование динамики его работы.
Кривошипно-кулисный механизм с поступательно движущейся кулисой служит для преобразования вращательного движения кривошипа в прямолинейно-поступательное движение кулисы. В механизме кулиса может быть расположена вертикально или наклонно. Применяется такой механизм для малых длин хода и находит широкое применение в счетных машинах (синусный механизм).
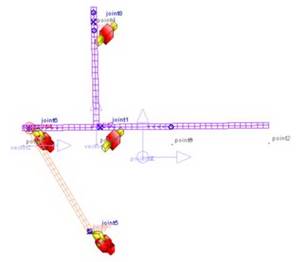
Модель механизма.
Описание механизма: На рисунке выше представлено схематичное изображение исследуемого кривошипно-кулисного механизма. Принцип его работы заключается в следующем: кривошип 1 вращается вокруг неподвижной оси; кривошип соединен с кулисой 2 при помощи ползуна 3 (кривошип с ползуном образуют пару вращения, а ползун с кулисой – поступательную пару), таким образом, кривошип вращаясь передает движение через ползун на кулису, которая совершает возвратно-поступательное движение в вертикальной плоскости.
Схема работы механизма
Положение 1 Положение 2
Положение 3 Положение 4
|