
Принципы построения и управления ШИП
Упрощённая схема ШИП представлена на рисунке 10. Она содержит четыре транзисторных ключа ТК1-ТК4. В диагональ моста, образованного транзисторными ключами, включена нагрузка.
Рисунок 10 – Схема транзисторного ШИП
Нагрузкой в приводах постоянного тока является двигатель постоянного тока. Питание ШИП осуществляется от источника постоянного тока, шунтированного конденсатором. Наиболее простой способ управления ШИП по цепи якоря симметричный. При симметричном способе управления в состоянии переключения находятся все четыре транзисторных ключа моста, а напряжение на выходе ШИП представляет собой знаки переменные импульсы, длительность которых регулируется входным сигналом. В ШИП с симметричным управлением среднее напряжение UЯна выходе ШИП равно нулю, когда относительная продолжительность включения g = 0,5. Временные диаграммы ШИП при симметричном способе управления приведены на рисунке 11. Симметричный способ управления обычно используется в маломощных приводах постоянного тока. Его преимуществом является простота реализации и отсутствие зоны нечувствительности в регулировочной характеристике. Недостатком ШИП с симметричным управлением является двухполярное напряжение на нагрузке и, в связи с этим, повышенные пульсации тока в якоре исполнительного двигателя.
Рисунок 11 – Диаграммы поясняющие работу ШИП при симметричном управлении
Стремление исключить этот недостаток привело к разработке способов, обеспечивающих однополярное напряжение на выходе ШИП. Простейшим из них является несимметричный. Несимметричное управление представлено на рисунке 12. В этом случае переключаются транзисторные ключи фазной группы ТКЗ и ТК4 (ключи ТК1 и ТК2 при противоположной полярности входного сигнала), транзисторный ключ ТК1 постоянно открыт и насыщен, а ключ ТК2 постоянно закрыт. Транзисторные ключи ТКЗ и ТК4 переключаются в противофазе, обеспечивая протекание тока якоря от противо-эдс двигателя. При этом на выходе ШИП формируются однополярные импульсы и среднее напряжение на выходе равно нулю, когда относительная продолжительность включения одного из нижних по схеме транзисторов g = 0. Недостатком рассмотренного способа управления является то, что верхние по схеме транзисторные ключи (ТК1, ТКЗ) по току загружены больше, чем нижние. Этот недостаток устранён при поочерёдном управлении, временные диаграммы которого изображены на рисунке 12 б. Здесь при любом знаке входного сигнала в состоянии переключения находятся все четыре транзисторных ключа моста, при этом частота переключения каждого из них в два раза меньше частоты напряжения на выходе. Управляющие напряжения транзисторных ключей одной фазы моста ТК1, ТК2 и ТКЗ, ТК4 постоянно находятся в противофазе; при этом ключи переключаются через период выходного напряжения Т. Этим достигаются одинаковые условия работы полупроводниковых приборов в мостовой схеме.
а) б)
Рисунок 12 – Диаграммы поясняющие работу ШИП при несимметричном управлении При некотором знаке входного сигнала управляющие импульсы u1, u4 длительностью t = (1+g)Tподаются на диагонально расположенные транзисторные ключи (рисунок 12) со сдвигом на полпериода, а управляющие импульсы u2, uЗ длительностью t = (1-g)T, также со сдвигом на полпериода, подаются на транзисторы противоположной диагонали (ТК2, ТКЗ). В этом случае на интервале нагрузка подключена к источнику питания с помощью диагонально расположенных ключей, а на интервале (1-g)T нагрузка закорочена с помощью верхних или нижних транзисторных ключей. При изменении знака входного сигнала порядок управления диагональными ключами изменяется на противоположный. При поочерёдном управлении на нагрузке формируются однополярные импульсы длительностью T, пропорциональной сигналу на входе. Обобщенная функциональная схема управления транзисторным ШИП изображена на рисунке 13. Она содержит генератор (Г), генератор пилообразного напряжения (ГПН), схему сравнения (СС), распределитель импульсов (РИ) и усилители (У). Как правило, между усилителями сигнала управления и распределителем включены элементы гальванической развязки (оптотранзисторы). Диаграммы на рисунке 14 поясняют принцип работы схемы управления ШИП.
Рисунок 13 – Обобщенная функциональная схема управления транзисторным ШИП
Рисунок 14 – Диаграммы поясняющие принцип работы схемы управления ШИП
Электромагнитные процессы в нагрузке (например, якоре двигателя постоянного тока) при двухполярном выходном напряжении (симметричном управлении транзисторными ключами ШИП) изображены на рисунке 15 а, а при однополярном выходном напряжении (несимметричном и поочередном управлении) — на рисунке 15 б.
а
б
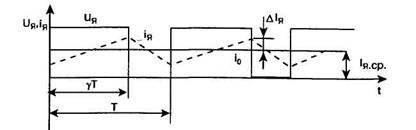
Рисунок 15 – Электромагнитные процессе в нагрузке при симметричном и несимметричном управлении ШИП
Из рисунка 15 видно, что ток в якоре содержит среднюю (гладкую) составляющую IЯ.СР.,и пульсирующую составляющую DIЯ. Гладкая составляющая тока обусловлена средним значением напряжения на якоре и установившейся скоростью вращения. Среднее напряжение на выходе ШИП определяется следующими выражениями:
(симметричное управление)
(несимметричное управление)
где g - скважность управления, о.е., т.е. относительная продолжительность включения:
где fКОМ – несущая частота коммутации ШИП.
Регулировочные характеристики широтно-импульсного преобразователя линейны и построить их не составляет труда.
При несимметричном и поочерёдном управлении ШИП в регулировочной характеристике электропривода имеет место зона нечувствительности. Схемные способы уменьшения этой зоны ухудшают устойчивость электропривода. Энергетические характеристики ШИП с несимметричным и поочерёдным управлением лучше, чем у ШИП с симметричным управлением, так как пульсации тока здесь в два раза меньше.
Контрольные вопросы
1. Что такое регулировочная характеристика вентильного преобразователя? 2. Что такое скважность? В каких пределах изменяется скважность при симметричном и несимметричном управлении ШИП? 3. Начертить регулировочную характеристику трехфазного широтно-импульсного преобразователя при симметричном управлении. 4. Пояснить принцип работы широтно-импульсного преобразователя при симметричном управлении транзисторами. 5. Сравнить два способа управления транзисторами при симметричном и несимметричном управлении ШИП. 6. Как влияет на работу широтно-импульсного преобразователя наличие в нагрузке источника ЭДС? 7. От чего зависит гладкая составляющая в токе нагрузки в системе широтно-импульсный преобразователь – двигатель постоянного тока? 8. От чего зависит пульсирующая составляющая в токе нагрузки в системе широтно-импульсный преобразователь – двигатель постоянного тока? При каком способе управления: симметричном или несимметричном она больше? Пояснить почему? 9. Какие достоинства и какие недостатки имеет широтно-импульсный преобразователь как силовой статический преобразователь энергии для привода постоянного тока, в сравнении с управляемым выпрямителем?
Рекомендуемая литература 1. Преображенский В.И. Полупроводниковые выпрямители. – М.: Энергоатомиздат, 1986. – 136 с.: ил.
2. Розанов Ю.К. Основы силовой электроники. – М.: Энергоатомиздат, 1992. – 296с.: ил.
3. Розанов Ю.К. Основы силовой преобразовательной техники. – М.: Энергия, 1979. – 392 с.
4. Москаленко В.В. Автоматизированный электропривод: Учебник для вузов. – М.: Энергоатомиздат, 1986. – 416 с.: ил.
5. Основы автоматизированного электропривода: Учеб. пособие для вузов/ М.Г. Чиликин, М.М. Соколов, В.М. Терехов, А.В. Шинянский. – М.: Энергия, 1974. – 568с.: ил.
|






 - при двухполярном напряжении
- при двухполярном напряжении - при однополярном напряжении
- при однополярном напряжении ,
,







 При выборе способа управления необходимо исходить из требований, предъявляемых к регулировочным и энергетическим характеристикам электропривода. Симметричное управление ШИП позволяет получить линейные регулировочные характеристики двигателя. Однако энергетические характеристики ШИП при этом способе управления ухудшены вследствие повышенных пульсаций тока в якоре и в полупроводниковых приборах.
При выборе способа управления необходимо исходить из требований, предъявляемых к регулировочным и энергетическим характеристикам электропривода. Симметричное управление ШИП позволяет получить линейные регулировочные характеристики двигателя. Однако энергетические характеристики ШИП при этом способе управления ухудшены вследствие повышенных пульсаций тока в якоре и в полупроводниковых приборах.


