
Электр жетек функциялары және оған қойылатын талаптар. Автоматтандырылған электр жетегінің өндірісте атқаратын қызметі
Қ озғ алтқ ыштар немесе беріліс механизмдері орындаушы механизмді қ озғ алтады, сондық тан осы екі бө лімді жетек деп атайды. Қ озғ алтқ ыштарғ а су мен желдің кү штері, ішкі жану қ озғ алтқ ыштары, беріліс механизмдері, білікдар, тісті дө ң гелектер, іске келтіруші белбеулер жә не т.б. жатады. Электр жетегі деп машинаның органдарын қ озғ алысқ а келтіру жә не олардың технологиялық ү рдістерін басқ ару ү шін арналғ ан электр механикалық қ ұ рылғ ыны айтады. Егер де қ озғ алту ү шін электр қ озғ алтқ ыштары қ олданылса, онда осы тү сінікті электр жетек деп атайды. Кө птеген ғ алымдар практикада айнымалы токта электр жетекті іске қ осу нә тижесін дә лелдеген. Мысалы трансформатор электр энергиясын бірнеше қ ашық тық та тұ рғ ан жерге жеткізе алады. Осы қ ұ былысты Яблочков ойлап тапқ ан. Сонымен қ атар айнымалы токты ү ш фазалы жү йеде қ олдану ү рдісін 1890 ж Доливо-Добровольский ойлап тапқ ан болатын. Бұ л негізінде ү ш фазалы асинхронды қ озғ алтқ ышты электр жетегін ө ндірісте кең інен қ олдануғ а мү мкіндік туғ ызды. Электр жетегінің тү рлері. Электр жетек кә сіпорынның немесе жеке цехтың трансмиссиясын айналдыратын бу машинасын алмастырды. Жетектің бұ л тү рі топтық деп аталады. Бұ л электр жетегінің кемшілігі ү лкен механикалық трансмиссиялардың сақ талуы, олардың кө мегімен механикалық энергия қ озғ алатын жұ мысшы машиналарғ а жә не орындаушы механизмдерге таралады. Кә сіпорындардың жә не цехтардың топтық электр жетегі жеке машиналардың топтық электр жетегімен ығ ыстырылды. Топтық электр жетегі деп бір электр қ озғ алтқ ышынан бірнеше жұ мысшы машиналар немесе бір машинаның бірнеше орындаушы механизмдері қ озғ алысқ а келтірілетін электр жетегін айтады. Топтық электр жетекті машиналар осы уақ ытқ а дейін кең қ олданысқ а ие болғ ан. Топтық электр жетегінің орындаушы механизмдерінің қ озғ алыс заң ын басқ ару механикалық қ ұ рылғ ылармен (басқ арылатын жалғ астырғ ыш, беріліс қ ораптары жә не т.б.) жасалады. Соң ғ ыларының кинематикасы кү рделі болады, ө йткені оларды ө ндіру, жасау жә не оларғ а қ ызмет кө рсету ү лкен шығ ындарды қ ажет етеді. Сол себепті электр жетегінің дамуында келесі қ адам дара электр жетегін қ ұ ру болып табылады. Дара электр жетегі деп машинаның ә р орындаушы механизмі жеке электр қ озғ алтқ ышымен немесе бірнеше электр қ озғ алтқ ышымен қ озғ алысқ а келтірілетін электр жетегін айтады. Соң ғ ы жағ дайда электр жетегі дара кө п қ озғ алтқ ышты деп аталады. Электр жетегінің дамуында дара электр жетегіне ауысу сапалы болып табылады, ө йткені бұ л жағ дайда электрлік энергияны механикалық энергияғ а тү рлендіретін басқ а электр жетегі механизмді қ озғ алысқ а келтіретін технологиялық ү рдістерді басқ ару функциясын орындайды. Қ азіргі заманғ ы электр жетегі дара автоматтандырылғ ан электр жетегі болып табылады. Бұ л электр жетегі автоматты басқ ару жү йесі (АБЖ) болып табылады, АБЖ-де қ арапайым жағ дайда электр жетегін іске қ осады жә не токтатады, ал кү рделі жағ дайларда қ озғ алысқ а келтірілетін орындаушы механизмнің технологиялық ү рдісін басқ арады. Автоматтандырылғ ан электр жетегінің қ уаты бірнеше ваттан (Вт) бірнеше он мың дағ ан киловаттқ а (кВт) дейінгі диапазонды қ амтиды. Автоматтандырылғ ан электр жетегі басқ арылатын жә не басқ арылмайтын, тұ рақ ты жә не айнымалы токты, транзисторлық жә не тиристорлық болып бө лінеді. Осы уақ ытқ а дейін реттелетін электр жетегі ретінде тұ рақ ты ток электр жетегі қ олданылғ ан. Соң ғ ы жылдары кү штік тү рлендіргіш техникадағ ы елеулі жетістіктер сенімді реттелетін айнымалы токты транзисторлық жә не тиристорлық электр жетектерінің қ ұ рылуына ә келді. Айнымалы ток электр қ озғ алтқ ыштарының тұ рақ ты ток электр қ озғ алтқ ыштарына қ арағ анда артық шылығ ы кө п болғ андық тан (арзанырақ, сенімді, салмақ тық жә не ө лшемдік кө рсеткіштері жағ ынан артық жә не қ ұ рылымы салыстырмалы тү рде қ арапайым) алдағ ы уақ ытта басқ арылатын айнымалы ток электр жетегінің қ арқ ындап дамуы кү тілуде. Бұ ғ ан басқ арылатын электр жетегіне микроү рдісорлық техниканың кең кө лемде енгізілуі жағ дай жасап отыр. Машиналардың жә не механизмдердің кинематикалық тізбектерін қ арапайымдауғ а ұ мтылу редукторсыз электр жетектерін қ ұ руғ а ә келеді, мұ нда редукторлық тармен салыстырғ анда сенімділігі жә не істеу шапшаң дығ ы артық болады. Машинаның кинематикасын, айнымалы, тұ рақ ты токты сызық ты машиналар негізінде басқ арылатын электр жетегінің қ олданылуын қ арапайымдатады. Бұ л кезде жұ мысшы органдардың қ озғ алысы кезінде машиналардың тиімді қ ұ рылымы ү шін максималды ың ғ айлық тар жасалады. Электр жетегінің қ олданылу аймағ ы. Электр қ озғ алтқ ыштың қ уаты жалпы орнық талғ ан қ уатқ а қ арағ анда 5% айырмашылығ ы болғ ан. Соң ғ ы жылдары электр қ озғ алтқ ыштың қ уаттары орнық ты қ озғ алтқ ыштың жалпы қ уатына тең болуы талап етілді. Ө ндірісте қ олданылатын электр жетектері 3 топқ а бө лінеді: жалпы, жекеленген, қ озғ алтқ ыштар топтары. Жалпы қ озғ алтқ ышты электр жетек тек қ ана бір электр қ озғ алтқ ышынан тұ рады. Осы жетек ә серінен бірнеше механизмдер іске кіреді. Бұ л жетектің бір ғ ана қ ысқ аша білікы болады жә не ол кө бінесе станоктың айналу жылдамдығ ын ө згертіп отырады, яғ ни жұ мысты токтатып қ оюғ а немесе станокты жұ мысқ а қ осуғ а мү мкіндік береді. Жетектеуші қ озғ алтқ ыштың токтап қ алуынан барлық механизмдер жұ мысын аяқ тайды, ал тек қ ана бір механизм жұ мысы жетектің ПӘ К тө мендетеді. Жекеленген электр жетегі тек бір ғ ана электр қ озғ алтқ ыштан тұ рады. Осы қ озғ алтқ ыш жекеленген орындаушы механизмді қ озғ алта алады. Осындай электр жетегімен бұ рғ ылау станоктары, аз қ уатты станоктар қ амтамасыз етіледі. Біріншіден энергия іс қ озғ алыс станокқ а бақ ылаушы жетек арқ ылы беріледі. Ол жетекті кейде жеке дара деп атайды. Кө п қ озғ алтқ ышты жетек бірнеше электр қ озғ алтқ ыштардан тұ рады. Ә рбір қ озғ алтқ ыш ө лшеуіш механизмнің жекеленген элементтерін қ озғ алысқ а келтіріп отырады. Жетектің осы тү рі кү рделі металл ө ң деуші қ уатты ү лкен станоктарда, қ ағ аз ө ң дейтін машиналарда, кө теруші крандарда жә не басқ а да қ уаты ү лкен механизмдерде қ олданылады. Тұ рақ ты ток машиналарында екі қ абаттан тұ ратын орамалар кең інен колданылады. Бұ ларда якорь науашаларында секцияның активтік бө ліктері екі қ абат орналасады. Ораманың ә р секциясы бір бірінен полюс бө лігіне шамалас болатын қ ашық тық та (ә р аттас кө ршілес полюстер осьтерінің ара қ ашық тығ ы) орналасқ ан екі активтік жақ тардан тұ рады. Активтік ө ткізгіштердің мұ ндай ара кашық тығ ында (орама адымы) ө ткізгіштерде индукцияланғ ан ЭҚ К-тер бір бағ ытқ а бағ ытталады да, секцияның ЭҚ К-інің мә ні ү лкен болады, ө йткені оның активтік жақ тарының ЭҚ К-тері бір бірімен қ осылады. Секцияның активтік жағ ының бір бө лігі науашаның жоғ арғ ы қ абатында, ал екінші бө лігі - тө менгі қ абатында болады. Ораманың жазып кө рсетілген сұ лбасында науашаның жоғ арғ ы қ абатында орналасқ ан активтік жағ ы тұ тас сызық пен, ал тө менгі қ абы ү зікті сызық пен кө рсетіледі. Секциялардың ұ штары ораманың басқ а секцияларымен де, коллекторлар тіліктерімен де жалғ анады. Орама кұ ратын секциялар бір бірімен, оларда индукцияланатын ЭҚ К-тер бір жақ қ а бағ ытталғ андай етіп қ осылады. Ол ү шін тізбектеп қ осылғ ан секциялардың бастапкы (соң ғ ы) ө ткізгіштері кез келген сә тте полярлығ ы бірдей полюстер астында болуы керек. Қ озғ алтқ ыш білігінде жү ктеме азайғ анда (Мэ> МТ) якорьдің айналуы ү дей бастайды. Ол оның орамасындағ ы кері ЭҚ К-ті ү лкейтуге алып келеді. Якорь орамасындағ ы ток кемиді жә не қ озғ алтқ ыштың айналдырушы моменті тө мендейді. Кері ЭҚ К, жиілік жә не якордегі ток моменттер қ айта тең герілгеніне ө згереді (Мэ > МТ). Бірақ та тұ рақ ты ток қ озғ алтқ ыштарында кө пшілік жағ дайларда жиіліктің кез келген ө згеруінде моменттердің тең герілуі бола бермейді де, айналдырушы момент қ озғ алтқ ыш білігіндегі тежегіш моменттен ә рқ ашан ү лкен болады (МЭ> МТ). Мұ ндай жағ дайда якорь айналу жиілігі ү здіксіз ө седі, теория жү зінде бұ л ө су шексіздікке ұ мтылады. Іс жү зінде жиілік нақ тылы (номинал) жиіліктен айтарлық тай асып кетсе, машина талқ андалып істен шығ ады, орамның маң дайшасының қ осылыстарының қ ұ рсаулары ү зіледі, орама ө ткізгіштері науашалардан шығ ып кетеді жә не т.с.с. Мұ ндай апаттық режимді қ озғ алтқ ыштың талқ андалу жү рісі деп атайды. Қ озғ алтқ ыш якорінің айналу бағ ыты полюстердің полярлығ ымен якорь орамасының ө ткізгіштеріндегі ток бағ ытына байланысты. Сонымен, қ озғ алтқ ышты реверстеу, яғ ни якорьдің айналу бағ ытын ө згерту ү шін полюстер полярлығ ын қ оздыру орамасын ауыстырып қ осу арқ ылы ө згерту керек немесе якорь орамасындағ ы токтың бағ ытын ө згерту керек. Қ оздыру орамасының біршама индуктивтілігі болатындық тан, оны ауыстырып қ осу орынсыз. Сондық тан, тұ рақ ты ток қ озғ алтқ ышын ә детте якорь орамасын ауыстырып қ осу арқ ылы реверстейді. Электр жетегі – басқ арылатын электр механикалық жү йе. Оның қ ызметі – электрлік энергияны механикалық энергияғ а жә не керісінше, механикалық энергияны электрлік энергияғ а тү рлендіру жә не осы ү рдісті басқ ару. Электр жетегі біріккен электр механикалық жү йені кө рсетеді, оның қ ұ рылымдық сұ лбасы 5.1-суретте берілген.
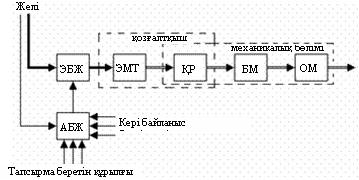
5.1-сурет. Электр жетегінің қ ұ рылымдық сұ лбасы
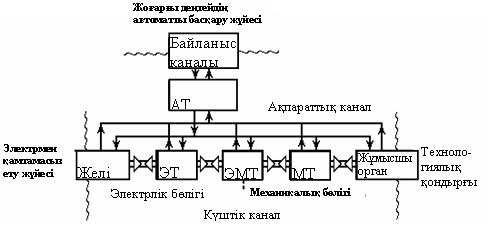
5.1-суретте келесі белгілер қ абылданғ ан: ЭБЖ – басқ ару жү йесінің энергетикалық бө лімі; АБЖ – басқ ару жү йесінің ақ параттық бө лімі; ЭМТ – электр механикалық тү рлендіргіш; Қ Р– қ озғ алтқ ыштың роторы; БМ – беріліс механизмі; ОМ – орындаушы механизм. Желіден тұ тынатын электрлік энергия электр механикалық тү рлендіргіш (ЭМТ) арқ ылы механикалық энергияғ а тү рленеді. Механикалық энергия қ озғ алтқ ыштың роторына (Қ Р) беріледі, ол жерде оның шамалы бө лігі кинетикалық энергияның қ орын ұ лғ айтуғ а жә не қ озғ алтқ ыштың механикалық шығ ындарына жұ мсалады. Механикалық энергияның қ алғ ан бө лігі қ озғ алтқ ыштың бө лігінен беріліс механизмі (БМ) арқ ылы орындаушы механизмге (ОМ) жә не одан кейін жұ мысшы органғ а беріледі. Қ азіргі заманғ ы электр жетегінде ЭБЖ электр жетегінің жұ мысына қ ажетті токтың, кернеудің жә не жиіліктің тү рленуін қ амтамасыз ететін электрлік энергияның басқ арылатын тү рлендіргіші ретінде қ олданылады. Ақ параттық басқ ару жү йесі (АБЖ) берілген жұ мыс режимдері, жү йенің ағ ымдағ ы жағ дайы жә не технологиялық ү рдістің ө туі туралы ақ парат негізінде энергияны тү рлендіру (электрлікті механикалық қ а жә не керісінше) ү рдісін басқ арады. Қ озғ алтқ ыштың роторына ω жылдамдығ ы кезінде М электр магниттік моменті берілген, оның ә серінен механикалық бө лігі қ озғ алысқ а келтіріледі жә не машинаның жұ мысшы органында технологиялық ү рдіспен қ арастырылғ ан жұ мыс орындалады. Электр жетегінің екі каналы бар - кү штік жә не ақ параттық (5.2-сурет). Бірінші канал арқ ылы тү рленетін энергия тасымалданады (5.2-суреттегі қ алың стрелкалар), екінші канал арқ ылы энергия ағ ыны басқ арылады, сонымен қ атар жү йенің кү йі мен жұ мысы жө нінде мә ліметтер жинақ талады жә не ө ң деледі, оның ақ ауларының диагностикасы жү ргізіледі (5.2-суреттегі жің ішке стрелкалар).
5.2-сурет. Электр жетегінің жалпы қ ұ рылымдық сұ лбасы
Кү штік канал екі бө лімнен тұ рады – электрлік жә не механикалық, жә не міндетті тү рде байланыстырушы буыны болады, ол – электр механикалық тү рлендіргіш. Кү штік каналдың электрлік бө ліміне электрлік энергияны қ оректену кө зінен (ө ндірістік электр желісінің шиналарынан, автономды электрлік генератордан, аккумуляторлық батареядан жә не т.б.) электр механикалық тү рлендіргішке ЭМТ жә не керісінше беретін жә не қ ажет болса, электрлік энергияны тү рлендіретін (ЭТ) қ ұ рылғ ылары кіреді. Механикалық бө лімі электр механикалық тү рлендіргіштің жылжымалы органынан, механикалық берілістен жә не пайдалы механикалық энергия ө ндірілетін қ ондырғ ының орындаушы органынан тұ рады. Электр жетегі, бір жағ ынан, электрмен қ амтамасыз ету жү йесімен немесе электрлік энергия кө зімен, екінші жағ ынан, технологиялық қ ондырғ ымен немесе машинамен, ү шінші жағ ынан ақ параттық тү рлендіргіш (АТ) арқ ылы жоғ ары дең гейлі ақ параттық жү йемен (кө бінесе адам – оператор) байланысады (5.2-сурет). Электр жетегін берілген жү йелердің бө лігі тү рінде олардың ішкі жү йесі ретінде санауғ а болады. Шындығ ында, электрмен қ амтамасыз ету бойынша маманды электр жетегі электрлік энергияны тұ тынушы ретінде, ал технологты немесе машина конструкторын – механикалық энергияның кө зі ретінде, автоматтты басқ ару жү йесін жасайтын жә не оны пайдаланатын инженерді – оның жү йесін технологиялық ү рдіспен немесе электрмен қ амтамасыз ету жү йесімен байланыстыратын дамығ ан интерфейс ретінде қ ызық тырады. Механикалық энергиямен, қ озғ алыспен байланысты барлық ү рдістер дерлік электр жетегі арқ ылы іске асырылады. Бұ ғ ан тек электрлік емес қ озғ алтқ ыштарды қ олданатын автономды кө ліктік қ ұ рылғ ылар жатпайды (автомобильдер, самолеттер, жылжымалы қ ұ рамның кейбір тү рлері). Салыстымалы тү рде аз ө ндірістік қ ондырғ ыларда гидрожетек, одан да сирек – пневможетек қ олданылады. Электр жетегінің мұ ндай кең ауқ ымда қ олданылуы электрлік энергияның ерекшеліктеріне байланысты: оны кез келген қ ашық тық қ а тасымалдауғ а мү мкіндігі, ә р уақ ытта оны пайдалануғ а дайын болуы, энергияның басқ а тү рлеріне оң ай тү рленуі. Бү гінгі таң да аспаптық жү йелерде қ уатты бірлік микроваттқ а тең электр жетектері қ олданылады; газды сорып алатын станциядағ ы компрессордың электр жетегінің қ уатты бірнеше ондық мегаватты, яғ ни қ уаты бойынша қ азіргі заманғ ы электр жетектерінің диапазонынан 1012-не артық. Осы тұ рғ ыда айналу жиілігінің диапазоны: жартылай ө ткізгіштің кристаллдарын алатын қ ондырғ ыда қ озғ алтқ ыштың бө лігі қ озғ алыстың біркелкілігіне қ атаң талаптар кезінде 1 айналымдағ ы бірнеше ондық сағ атта жасалуы керек; ажарлағ ыш шарық тастың айналу жиілігі қ азіргі заманғ ы жақ сы білдекте 150000 айн/мин бола алады. Бірақ анағ ұ рлым кең – шексіз кең – қ азіргі заманғ ы электр жетектерінің қ олданылу диапазоны: жасанды жү ректен экскаваторғ а дейін, желдеткіштен радиотелескоптың антеннасына дейін, кір жуатын машинадан иілгіш ө ндірістік жү йеге дейін. Осы ерекшелік – технологиялық сферамен тығ ыз ө зара байланысы – электр жетегіне қ атты ә сер жасағ ан жә не жасап келеді. Технологиялық қ ондырғ ылардан кө бейіп келе жатқ ан талаптар электр жетегінің дамуын, оның элементарлық базасының, ә дістемесінің жетілгенін анық тайды. Электр жетегінің функциялары. Электр жетегінің кү штік (энергетикалық) каналын қ арастырайық (5.3-сурет). Қ уат (Р) желі (Р1) арқ ылы жұ мысшы органғ а (Р2) беріледі, бұ л ү рдіс басқ арылады жә не беріліс пен қ уатты тү рлендіру кү штік каналдың ә р элементінде Электрлік тү рлендіргіштің ЭТ функциясы болып (егер ол қ олданылса) қ оректену кө зінен (желіден) алынатын жә не желінің Uж кернеуімен, Iж тогымен сипатталатын электрлік энергияғ а тү рлендіру жатады. Тү рлендіргіштер басқ арылмайтын (трансформатор, тү зеткіш, параметрлік ток кө зі) жә не кө бінесе басқ арылатын (мотор-генератор, басқ арылатын тү зеткіш, жиілікті тү зеткіш) болады, олар біржақ ты (тү зеткіш) жә не екі жақ ты (мотор-генератор, басқ арылатын тү зеткіш екі комплектілі вентильмен) ө ткізгіштікке ие бола алады. Тү рлендіргіштің біржақ ты ө тімділігі жә не энергияның кері (жү ктемеден) ағ ыны жағ дайында тежегіш энергияны “қ ұ ю” ү шін қ осымша R резисторы қ олданылады. Электр механикалық тү рлендіргіш ЭМТ ә р уақ ытта электр жетегінде болады, электрлік энергияны (U, I) механикалық энергияғ а (М,
5.3-сурет. Энергетикалық канал
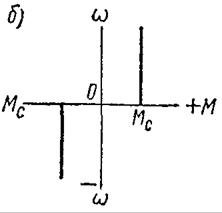
Механикалық тү рлендіргіш (беріліс) – редуктор, бұ рама-сомын жұ бы, блоктар жү йесі, қ ос иінді-бұ лғ ақ ты механизм жә не т.с.с. қ озғ алтқ ыштың М моментін жә не Тү рленетін энергияны сипаттайтын шамаларды – кернеулер, токтар, моменттер (кү штер), жылдамдық тар – электр жетегінің координаталары деп аталады. Электр жетегінің негізгі функциясы координаталарды басқ аруда, яғ ни олардың қ ызмет кө рсетілетін технологиялық ү рдістің талабына сә йкес мә жбү рлік бағ ытталғ ан ө згерісінде. Координаталарды басқ ару электр жетегінің элементтерінің қ ұ рылымының рұ қ сат етілген шегінде ғ ана жасалуы керек, осы арқ ылы жү йенің жұ мысының сенімділігі қ амтамасыз етіледі. Бұ л рұ қ сат етілген шектер жабдық ты жасағ андармен жә не оның тиімді пайдалануын қ амтамасыз ететін координаталардың номиналды мә ндерімен байланысты. Дұ рыс ұ йымдастырылғ ан жү йеде координаталарды басқ ару (энергия ағ ынын) кезінде барлық элементте Бұ л сұ рақ тар – ә р тү рлі электр жетектерінің қ асиеттері мен сипаттамалары, олардың координаталарын орнық қ ан – статикалық - ө тпелі – динамикалық режимдерде қ алай дұ рыс басқ ару, энергетикалық қ асиеттерін қ алай бағ алау жә не электр жетегінің кү штік бө лімін қ алай дұ рыс жобалау – курстың негізгі мә ні болады. Курста электр жетегінің ақ параттық каналына тиісті қ ызық ты жә не қ арапайым емес мә селелер қ арастырылмайды: біз қ азіргі заманғ ы техникалық қ ұ рылғ ылар кез келген қ ажетті ә серлерді қ амтамасыз ете алады деп есептейміз жә не практика жү зінде қ алайша асырылатынына емес, электр жетегін басқ ару жү йесі не істеу керек, соғ ан баса кө ң іл аударамыз. Электр жетегінің кү штік бө лімінің қ ұ рылымына жай қ арағ анның ө зінен оқ у нысанының кү рделі екендігін тү сінуге болады (5.1.2-сурет): ә р текті элементтер – электрлік жә не электрондық, механикалық, басқ аруғ а қ ажет қ арапайым емес ү рдістер, жә не т.с.с. Пә нді оқ ыту кезіндегі нә тиже – негізгі қ ұ былыстарды терең тү сіну жә не қ арапайым, бірақ практика ү шін маң ызды есептерді шығ ара білу – тек шарттар орындалғ аннан кейін ғ ана іске асырылатыны анық. Біріншіден, ө те кү рделі объектілердің реалды модельдерімен жұ мыс істеуді ү йрену керек, яғ ни реалды объектінің оқ ытылатын қ асиеттері бейнеленетін жасанды қ арапайым нысандармен жұ мыс істеуді ү йрену керек. Екіншіден, не қ ажет жә не қ аншалық ты қ ажет екендігін бейнелейтін, артық емес, бірақ жаман да емес тек жақ сы модельдерді қ олдануғ а ұ мтылу керек. Бұ л оң ай емес жә не оғ ан айтарлық тай кө ң іл бө лінеді. Ү шіншіден, сол немесе одан басқ а модель алынғ ан шарттар қ атаң болу керек. Егер олай болмаса, онда нә тижелерінде ешқ андай мә н болмауы мү мкін. Сонымен, негізгіні таң дап, қ осалқ ыны (жекені) алып тастай білу керек. Негізгі принциптерді, ө лшемдерінің сә йкестігін, бас қ атынастарын, заң дылық тарын терең тү сіну жә не практикада қ олдана білу – курстың негізгі мақ саты. Кү ш жә не моменттер. Статикалық жә не динамикалық моменттер. Электр жетегінің қ ажетімен танысқ анда кү ш жә не моменттермен кө п кездесеміз. Кү ш Ньютонмен (Н) ө лшенсе, момент ньютон ·метрмен ө лшенеді. Барлық есептеулер Халық аралық жү йеде беріледі. Мысалы, GD2 – моментін [кгс·м2] инерция моментіне J=GD2/4 [кг·м2] айналдыру керек; айналу жиілігін n (об/мин) бұ рыштық жылдамдық қ а w=n/9, 55 [рад/с] айналдыру керек. Қ азіргі электр жетегінде электр қ озғ алтқ ыш механикалық беріліс арқ ылы жұ мыс органымен орындаушы механизмін қ озғ алысқ а келтіреді. Орындаушы механизмінің қ ызметін жү к кө тергіш барабаны, прокат станогының білікы атқ арады. Қ озғ алтқ ыш редуктор арқ ылы барабанды айналдырады. Барабанның айналу бағ ытына байланысты жү к біресе кө теріледі, біресе тө мен тү седі. Осылайша жетекте айналмалы элементімен қ атар кө терілмелі қ озғ алыс орын алады. Егер қ озғ алтқ ыш тұ рақ ты жылдамдық пен айналса, айналмалы момент кедергі моментке тең болады жә не оны жең еді. Осы кедергі моментін статистикалық моменті деп атайды. Статистикалық моменттің қ ызметін кранның тележкасы, жү к кө теру моменті, металды кесуге арналғ ан момент жә не тағ ы басқ асы атқ арады. Статистикалық моменттер активті жә не реактивті болып бө лінеді. Активті моменттер ү немі бір бағ ытта ә сер етеді, оның қ ызметін жү к моменті атқ арады. Осы момент жү ктің тү су бағ ытына бағ ыттас ә сер етеді. Серіппелі дененің сығ ылуы немесе созылуы кезіндегі моменттерді потенциалдық моменттер деп аталады, ө йткені осы моменттің ә сері потенциалдық энергияның ө згерісіне байланысты болады. Реактивті моменттер ү немі қ озғ алыстың бағ ытына қ арсы ә сер етеді. Осы моментке тежелу кү шінің моменті, металды кесу кезіндегі моменттер жатады. 5.4-суретте активті жә не реактивті статистикалық моменттердің айналу бағ ытына байланысы кө рсетілген.
5.4-сурет. Активті жә не реактивті статистикалық моменттердің айналу бағ ытына байланысы кө рінісі
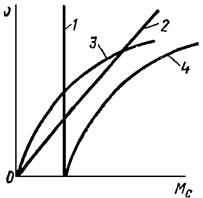
Активті момент тура жә не кері айналу бағ ытында ө згеріссіз қ алады. Реактивті моменттер айналу бағ ыты ө згеруіне байланысты белгісін ө згертеді. Статистикалық моменті ә сер ететін механизмі ретінде центробежді сорғ ы, желдеткіш қ олданылады, осы механизмнің статистикалық моменті жылдамдық тың квадратына пропорционал. Механизмнің айналу жылдамдығ ының статистикалық моментіне байланысы w=f(Mc) ө ндіріс механизмінің механикалық сипаттамасы деп атайды, бұ л 5.5-суретте кө рсетілген. 5.5-суретте 1 - тұ рақ ты статистикалық моментті механизмінің механикалық сипаттамасы, 2 - механизмнің Mc=Cw2 кезіндегі механикалық сипаттамасы (мысалы тұ рақ ты токтағ ы генератор), 3 – желдеткіштің механикалық сипаттамасы, 4- реалды центробеж сорғ ының механикалық сипаттамасы кө рсетілген, Mc=MCT+Cw2. Электр жетегі ү немі жылдамдық ө згеріп тұ рғ анда жұ мыс істейді, кө бейгенде жә не азайтқ анда электр жетегі жылдамдайды немесе баяулайды. Мысалы осы режимге қ озғ алтқ ыштың қ осылуы, білікдың жү ктемесінің азаюы, кө беюі, тежелуі жатады. Осы жағ дайларда моменттер статистикалық моментпен тең еседі:
M+MC≈ MД, (5.1)
мұ ндағ ы М – айналу моменті; МС – статистикалық моменті; МД – динамикалық момент.
5.5-сурет. Ө ндіріс механизмінің сипаттамалары
Динамикалық момент келесі ө рнекпен анық талады:
MД=М+МС, (5.2)
егер ә сер ету бағ ыты қ озғ алыс бағ ытымен сә йкес келсе, соң ғ ы тең деуінің сол жағ ындағ ы моменттер оң бола алады, ал егер керісінше болса, онда моменттер теріс таң бағ а ие болады. Оң таң бағ а ие болса, онда электр жетегі ү дей тү седі, MД – оң таң балы болады. Ал егер (5.1) тең деуінің сол жағ ы теріс болса, онда электр жетегі тежеледі жә не динамикалық момент MД теріс таң балы болады. Ал егер де қ озғ алыс моменті тең жә не статистикалық моментке қ арсы болса, MД=0 болады, М+МС=0, ал қ озғ алтқ ыш тұ рақ ты жылдамдық пен айналады. Жетектің жедел токталуы ү шін механикалық тежелу қ олданылады. Қ озғ алыс тең деуі. Ең қ арапайым механикалық жү йені қ арастырайық, оғ ан қ озғ алтқ ыштың роторы жә не онымен тікелей байланысқ ан жү ктеме – машинаның жұ мысшы органы кіреді (5.6-сурет). Қ арапайымдылығ ына қ арамастан, жү йе толық реалды: дә л осы тү рде сораптардың, желдеткіштердің жә не басқ а машиналардың механикалық бө лігі орындалғ ан. 5.6-суретте жү йеге екі момент қ ойылғ ан деп есептейміз – қ озғ алтқ ыш жә не жү ктеме арқ ылы пайда болғ ан электр магниттік момент М, сонымен қ атар механикалық бө лігінің шығ ынынан (ү йкеліс) болатын момент Мс; ә р моменттің ө зінің шамасы мен бағ ыты болады. Жү йенің қ озғ алысы Ньютонның екінші заң ымен анық талады:
мұ ндағ ы (5.2) тең деуінің оң жақ бө лігі - динамикалық момент
5.6-сурет. Механикалық бө лімнің моделі
Жетек қ озғ алысының тең деуі. Реактивті моменті бар жетекті желіден ажыратқ анда оның моменті нольге тең еледі. Қ озғ алыс тең деуі келесі тү рге айналады да
МС = – MД,
жетек токтала бастайды. Динамикалық момент бұ рыштың ү деуімен инерцияның динамикалық моменті арқ ылы анық талады.
MД=I(dw/dt),
мұ ндағ ы MД – н.м., ал I - кг∙ м2 ө лшенеді.
(5.1) тең деуіндегі моменттердің белгісі анық талады: а) қ озғ алтқ ыш моменті қ озғ алтқ ыш бағ ытымен сә йкес келеді (М›0); МС қ арсы бағ ытқ а бағ ытталғ ан (МС‹ 0). Динамикалық момент оң (dw/dt)> 0, яғ ни жү йе ү дей тү седі. Қ озғ алтқ ыш тең деуі:
М – МС = MД = I(dw / dt);
б) электр тежелу кезінде, жү кті кө теру кезінде, (dw/dt) < 0, яғ ни жү йе баяулай тү седі. МС активті, ол тө менге ә сер етеді, яғ ни қ озғ алысқ а қ арсы бағ ытталғ ан. Қ озғ алыс тең деуі:
– М – МС = – MД = – I (dw / dt);
в) ауыр жү кті тү сіретін кезіндегі электрлік тежелу: М – қ озғ алысқ а қ арсы бағ ытталғ ан, МС – қ озғ алысқ а бағ ыттас. Тең деу:
– М + МС = MД = I (dw / dt),
егер (М) > (МС) - баяулайды, MД < 0; егер (М) ‹ (МС) - жү к ә серінен ү деу ә сер етеді, MД > 0; егер (М) = (МС) - MД=0, жү к тұ рақ ты жылдамдық пен тү се бастайды.
F – FC = FД = m (dv / dt),
мұ ндағ ы F – қ озғ алыс кү ші; m – масса; FC – қ озғ алыс кедергісінің кү ші; dv / dt – сызық тық ү деуі; FД – динамикалық кү ші.
|
 Р шығ ындарымен болады деп аламыз.
Р шығ ындарымен болады деп аламыз. ) жә не керісінше тү рлендіреді.
) жә не керісінше тү рлендіреді.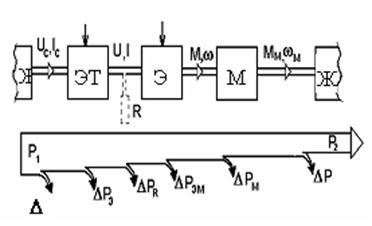
 Р шығ ындары азайту керек жә не жұ мысшы органғ а сол кездегі қ ажетті қ уат берілуі керек.
Р шығ ындары азайту керек жә не жұ мысшы органғ а сол кездегі қ ажетті қ уат берілуі керек.
 , (5.2)
, (5.2) . Ол егер М жә не Мс моменттерінің алгебралық қ осындысы нольге тең болмаса ғ ана пайда болады; динамикалық моменттің шамасы жә не таң басы ү деуді анық тайды.
. Ол егер М жә не Мс моменттерінің алгебралық қ осындысы нольге тең болмаса ғ ана пайда болады; динамикалық моменттің шамасы жә не таң басы ү деуді анық тайды.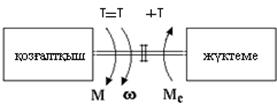
 , яғ ни М жә не Мс моменттері шамасы жағ ынан бір-біріне тең жә не бағ ыттары жағ ынан бір-біріне қ арама-қ арсы болғ анда режимдерді орнық қ ан немесе статикалық деп атайды, оғ ан
, яғ ни М жә не Мс моменттері шамасы жағ ынан бір-біріне тең жә не бағ ыттары жағ ынан бір-біріне қ арама-қ арсы болғ анда режимдерді орнық қ ан немесе статикалық деп атайды, оғ ан  , сонымен қ атар
, сонымен қ атар  сә йкес келеді.
сә йкес келеді. болғ анда режимдерді ө тпелі немесе динамикалық (ү деу, тежеу) деп атайды. (5.1) тең деуінде Мс моменті толығ ымен дерлік жү ктеменің қ асиетімен анық талады, ал тә уелсіз айнымалы ретінде санауғ а болатын М моменті қ озғ алтқ ышпен қ алыптасады.
болғ анда режимдерді ө тпелі немесе динамикалық (ү деу, тежеу) деп атайды. (5.1) тең деуінде Мс моменті толығ ымен дерлік жү ктеменің қ асиетімен анық талады, ал тә уелсіз айнымалы ретінде санауғ а болатын М моменті қ озғ алтқ ышпен қ алыптасады.  шамасы динамикалық режимдерде нақ ты шарттар ү шін (5.1) тең деуінің шешімімен анық талады, ал статикалық режимдерде келесі шартпен анық талады:
шамасы динамикалық режимдерде нақ ты шарттар ү шін (5.1) тең деуінің шешімімен анық талады, ал статикалық режимдерде келесі шартпен анық талады: .
.


