
Способы регулирования частоты вращения трехфазного асинхронного двигателя
Регулирование частоты вращения электрических асинхронных двигателей является очень важной проблемой. Основным недостатком асинхронных двигателей является ограниченная возможность регулирования частоты вращения по сравнению с двигателями постоянного тока, которые позволяют изменять частоту вращения в очень широких пределах. В настоящее время используются следующие основные методы регулирования частоты вращения асинхронных двигателей. Изменение частоты вращения достигается: а) изменением приложенного напряжения, б) изменением числа пар полюсов, в) изменением частоты питающей сети, г) изменением сопротивления обмотки ротора, д) введением в роторную цепь дополнительной ЭДС такой же частоты, как и частота обмотки ротора. Последний способ достаточно сложен. 6.22.1. Изменение частоты вращения с помощью В соответствии с принципом действия асинхронных двигателей вращение магнитного поля статора определяется частотой питающей сети
При неизменной частоте питающей сети частота вращения магнитного поля Изменение числа пар полюсов машины можно осуществить следующим образом: а) изменением способа соединения статорной обмотки, б) расположением на статоре двух или более независимых обмоток, обеспечивающих при их использовании различное число пар полюсов, в) расположением на статоре обмоток, обеспечивающих возможность коммутации с целью получения различного числа пар полюсов. Двигатели с изменяющимся числом пар полюсов изготавливаются с короткозамкнутым ротором, т. е. с обмоткой в форме беличьего колеса. Существует много методов изменения числа пар полюсов. Чаще всего используют метод коммутации статорной обмотки с целью изменения направления тока в различных частях каждой фазной обмотки. Объяснить получение различного числа пар полюсов с помощью коммутации обмотки статора можно, продемонстрировав пример двух полуобмоток (рис. 6.51).
а б Рис. 6.51
Если обмотка фазы Примеры схем коммутации статорной обмотки с целью получения различного числа пар полюсов приведены на рис. 6.52, a, б. В первом случае обмотки статора соединены треугольником. При этом обмотки каждой фазы состоят из двух полуобмоток, расположенных в статоре со сдвигом в пространстве на 180 °. С помощью аппаратов управления полуобмотки каждой фазы включаются параллельно по схеме «звезда». Трехфазное напряжение при этом подводится к средней точке каждой обмотки, и направление тока в половинах каждой из фазных обмоток меняется на противоположное, обеспечивая большее количество пар полюсов.
Рис. 6.52
Измерение числа пар полюсов можно получить, не изменяя схемы соединения обмотки (имеется ввиду переход от соединения «треугольник» к соединению «звезда»). На рис. 6.52 представлена схема соединения обмотки статора «звездой». Как и в предыдущем случае, фазные обмотки статора состоят из полуобмоток. Изменение направления тока в одной из полуобмоток каждой фазы приводит к увеличению числа пар полюсов и, как следствие, к изменению синхронной скорости. Следует отметить то, что изменение числа пар полюсов возможно только у двигателей, у которых выведены на клеммную панель соответствующие точки обмоток. Промышленность выпускает в основном одно- и двухскоростные двигатели. Изменяя число пар полюсов, можно получить следующие частоты вращения магнитного поля при частоте сети 50 Гц: 3000, 1500, 1000, 750 и 500 об/мин. Изменение числа пар полюсов коммутацией обмотки статора приводит к изменению направления вращения, поэтому для сохранения направления вращения магнитного поля необходимо изменить порядок следования фаз питающей сети. 6.22.2. Изменение частоты вращения двигателя Этот метод изменения скорости вращения возможен только в том случае, когда имеется специальный преобразователь, позволяющий получать трехфазное напряжение регулируемой частоты. Эту роль может выполнить синхронный генератор с изменяющейся скоростью вращения. В настоящее время широко используются статические полупроводниковые преобразователи частоты. При питании асинхронного двигателя от источника переменного тока регулируемой частоты необходимо учитывать то, что электромеханические параметры двигателя будут различными на разных частотах (рис. 6.53).
Рис. 6.53
Величина критического скольжения механической характеристики
при уменьшении частоты увеличивается. Максимальный момент в соответствии с формулой
также увеличивается с уменьшением частоты. Аналогично изменяется и величина пускового момента. Изменение вида механической характеристики при изменении частоты питающего напряжения должно учитываться в системах частотного управления асинхронным двигателем. С изменением частоты изменяются и рабочие характеристики двигателей, так как при уменьшении частоты увеличивается ток холостого хода двигателя, сопровождающийся увеличением магнитного потока при неизменном напряжении питания. Все изменения приводят к необходимости одновременного изменения частоты сети и питающего напряжения. Взаимозависимость напряжения и частоты сети определяются реальными условиями работы двигателя. При постоянном моменте нагрузки желательно сохранить неизменным значение максимального момента, развиваемого двигателем, т. е. не зависящим от частоты питающей сети. Но как следует из ранее приведенной формулы
или Откуда следует, что для поддержания максимального момента механической характеристики необходимо напряжение сети изменять пропорционально ее частоте. Например, при управлении двигателем, рассчитанным для работы от сети 380 В, 50 Гц при уменьшении частоты питающей сети в два раза (25 Гц), напряжение сети должно быть равным 190 В. Если по условиям эксплуатации при изменении частоты вращения должна оставаться неизменной мощность на валу двигателя, т. е.
или то напряжение и частота сети должны быть связаны между собой соотношением
где
6.22.3. Регулирование частоты вращения ротора
Как уже было сказано ранее, общий вид механической характеристики и, прежде всего, критическое скольжение при прочих равных условиях зависят от сопротивления роторной обмотки. Это явление может быть использовано для изменения скорости вращения асинхронных двигателей с фазным ротором. Этот способ регулирования скорости заключается в введении сопротивления в цепь ротора (рис. 6.54). Ранее мы уже видели, что увеличение сопротивления роторной цепи увеличивает критическое скольжение. Если момент сопротивления на оси двигателя неизменный и если увеличить сопротивление роторной цепи, скольжение увеличится и скорость вращения пропорционально уменьшится.
На рис. 6.55 представлено семейство механических характеристик двигателя при различных сопротивлениях реостата, включенного последовательно с роторной обмоткой. Если сопротивление реостата Таким способом можно изменить частоту ротора в пределах от номинального скольжения и до полной остановки двигателя. Этот способ регулирования скорости неэффективен, так как связан с большими потерями электрической энергии. Механическая мощность уменьшается пропорционально уменьшению частоты вращения ротора при постоянном механическом моменте, и в то же время потери в дополнительном сопротивлении ротора увеличиваются пропорционально. Скорость вращения может быть изменена изменением напряжения питания, но этот метод регулирования используют очень редко, так как область устойчивого регулирования очень ограничена. 6.23. Рабочие характеристики асинхронных К рабочим характеристикам асинхронного двигателя относятся зависимости скорости вращения вала двигателя, входного тока, входной мощности, механического момента на валу, коэффициента мощности и скольжения от мощности на выходе двигателя. Характеристики показывают изменение величин при изменении нагрузки двигателя. Зависимость скорости вращения ротора двигателя
Эта характеристика (рис. 6.56) показывает изменение скорости вращения вала двигателя при изменении нагрузки двигателя. Для определения этой зависимости используем формулу для вычисления скольжения Если машина работает в режиме идеального холостого хода Зависимость Зависимость механического момента на валу двигателя
При работе двигателя в номинальном режиме механический момент, развиваемый двигателем, равен сумме момента на валу двигателя и момента сопротивления, обусловленного трением и дополнительными потерями
Зависимость КПД двигателя Как и все электрические машины, асинхронные двигатели имеют механические потери, потери в обмотках, потери в магнитопроводе и дополнительные потери. Потери в обмотках двигателя изменяются пропорционально квадрату тока, а потери в сердечнике изменяются пропорционально квадрату приложенного напряжения. При анализе зависимости КПД от нагрузки предполагается, что напряжение на зажимах двигателя равно номинальному напряжению. Мощность, потребляемая двигателем из сети
где
С увеличением нагрузки сумма потерь Электрические машины проектируют с учетом того, что в большую часть времени они работают с недогрузкой. Поэтому коэффициент полезного действия большинства электрических машин максимален тогда, когда постоянные потери равны переменным потерям, что составляет примерно 75 % номинальной мощности двигателей (рис. 6.58).
Зависимость коэффициента потребляемой мощности
Ток, потребляемый двигателем из сети, отстает по фазе от подведенного напряжения. Двигатели, работающие в режиме холостого хода, обычно имеют коэффициент мощности около 0, 2, но при увеличении нагрузки он достаточно быстро увеличивается и имеет максимальное значение при мощности, близкой Изменение коэффициента потребляемой мощности Зависимость потребляемой двигателем мощности
Мощность, потребляемая асинхронным двигателем из сети, зависит от режима работы двигателя. В режиме холостого хода мощность, потребляемая двигателем, полностью определяется потерями электрической энергии на перемагничивание магнитопровода машины и на потери мощности на преодоление сил трения и дополнительных механических потерь. Потери мощности в обмотках не являются определяющими. С увеличением механического момента на валу двигателя ток обмоток увеличивается. С увеличением токов обмоток потери энергии на нагревание проводов увеличиваются. При этом мощность потерь пропорциональна квадрату тока, поэтому зависимость
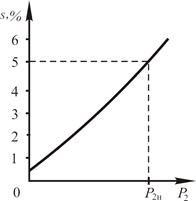
Зависимость скольжения двигателя Скольжение идеального двигателя, работающего в режиме холостого хода, равно нулю. Электромагнитная мощность реального двигателя, работающего в режиме холостого хода, не равняется нулю, так как для преодоления механического момента трения и на дополнительные потери требуется энергия. Кроме этого, потери мощности в обмотке ротора не равны нулю. На основании этого можно утверждать, что характеристика скольжения берет свое начало не из нуля. При увеличении нагрузки двигателя скольжение увеличивается практически пропорционально выходной мощности (рис. 6.61).
Рис. 6.61
При номинальной выходной мощности скольжение большинства двигателей составляет 4…6 %. 6.24. Работа асинхронного двигателя В ряде случаев возникает необходимость в быстром торможении асинхронного двигателя. Наиболее простым способом торможения является торможение противовключением. Торможение противовключением заключается в том, что с помощью аппаратов управления и коммутации статорной обмотки получают изменение направления вращения магнитного поля машины. Достаточно просто этого достигают изменением порядка следования фаз. При изменении направления вращения поля ротор за счет сил инерции продолжает вращаться в прежнем направлении, т. е. против поля. Скольжение будет больше единицы, так как при измененном направлении вращения ротора скорость ротора будет отрицательной и На рис. 6.62 приведена полная механическая характеристика асинхронного двигателя.
Рис. 6.62 Для стабильной работы двигателя необходимо иметь увеличение момента с увеличением скольжения. Поэтому областью устойчивой работы двигателя является область механической характеристики при скольжениях от 0 до Область отрицательных значений скольжения соответствует режиму, когда ротор вращается быстрее магнитного поля. Момент на валу отрицательный, и машина отдает энергию в сеть, т. е. работает в режиме генератора. Механический момент на валу асинхронного двигателя будет отрицательным тогда, когда нагрузка двигателя вращает его ротор, отдавая ему механическую энергию. При скольжениях, больших единицы
|
 и числом пар полюсов в соответствии с формулой
и числом пар полюсов в соответствии с формулой .
. зависит от числа пар полюсов. Частота же вращения магнитного поля определяет частоту вращения ротора.
зависит от числа пар полюсов. Частота же вращения магнитного поля определяет частоту вращения ротора.
 статора состоит из двух полуобмоток
статора состоит из двух полуобмоток  и
и  , то при их последовательном включении, когда конец полуобмотки
, то при их последовательном включении, когда конец полуобмотки  так же, как и в проводниках
так же, как и в проводниках  и
и  , токи будут протекать в одном направлении и суммарное магнитное поле будет иметь одну пару полюсов (рис. 6.51, б).
, токи будут протекать в одном направлении и суммарное магнитное поле будет иметь одну пару полюсов (рис. 6.51, б).




 ;
;  .
.
 ,
, ,
, - напряжение сети при частоте
- напряжение сети при частоте  - напряжение сети при частоте
- напряжение сети при частоте  .
. Рис. 6.54
Рис. 6.54
 Рис. 6.55
Рис. 6.55
 в цепи ротора равняется нулю, то при моменте нагрузки
в цепи ротора равняется нулю, то при моменте нагрузки  скольжение в соответствии с механической характеристикой 0 равно
скольжение в соответствии с механической характеристикой 0 равно  . Если сопротивление реостата не равно нулю (характеристика 1), угол наклона прямолинейной части механической характеристики уменьшится и двигатель обеспечит устойчивую работу при скольжении
. Если сопротивление реостата не равно нулю (характеристика 1), угол наклона прямолинейной части механической характеристики уменьшится и двигатель обеспечит устойчивую работу при скольжении  , т. е. при меньшей частоте вращения ротора. При дальнейшем увеличении сопротивления дополнительного трехфазного реостата частота вращения будет уменьшаться. При больших сопротивлениях реостата работа двигателя становится менее устойчивой, так как даже малое изменение момента на валу двигателя приводит к значительному изменению частоты вращения.
, т. е. при меньшей частоте вращения ротора. При дальнейшем увеличении сопротивления дополнительного трехфазного реостата частота вращения будет уменьшаться. При больших сопротивлениях реостата работа двигателя становится менее устойчивой, так как даже малое изменение момента на валу двигателя приводит к значительному изменению частоты вращения. Рис. 6.56
Рис. 6.56
 . Из формулы скольжения частота вращения ротора асинхронного двигателя
. Из формулы скольжения частота вращения ротора асинхронного двигателя  . С другой стороны, скольжение равно отношению мощности потерь в обмотке ротора
. С другой стороны, скольжение равно отношению мощности потерь в обмотке ротора  . Под электромагнитной мощностью понимают мощность, которая передается со статора на ротор посредством магнитного поля. Две приведенные формулы позволяют представить рассматриваемую зависимость аналитической формулой
. Под электромагнитной мощностью понимают мощность, которая передается со статора на ротор посредством магнитного поля. Две приведенные формулы позволяют представить рассматриваемую зависимость аналитической формулой  . Данная формула справедлива в том случае, когда пренебрегают механическими и дополнительными потерями.
. Данная формула справедлива в том случае, когда пренебрегают механическими и дополнительными потерями. , потери в обмотке ротора
, потери в обмотке ротора  равны нулю. Если асинхронный двигатель работает в режиме реального холостого хода, электромагнитная мощность равна сумме мощности потерь в обмотке ротора и мощности механических потерь.
равны нулю. Если асинхронный двигатель работает в режиме реального холостого хода, электромагнитная мощность равна сумме мощности потерь в обмотке ротора и мощности механических потерь. представляется кривой, имеющей малый наклон по отношению к оси абсцисс. Такого вида характеристика относится к жестким характеристикам, и на своем начальном участке она напоминает аналогичную характеристику двигателя постоянного тока с параллельным возбуждением (см. рис. 6.56).
представляется кривой, имеющей малый наклон по отношению к оси абсцисс. Такого вида характеристика относится к жестким характеристикам, и на своем начальном участке она напоминает аналогичную характеристику двигателя постоянного тока с параллельным возбуждением (см. рис. 6.56).
 Рис. 6.57
Рис. 6.57
 . В приведенной формуле
. В приведенной формуле  - используемый момент сопротивления, а
- используемый момент сопротивления, а  - момент сопротивления двигателя, работающего в режиме холостого хода. При изменении режима от холостого хода до номинальной нагрузки скорость вращения изменяется незначительно, а характеристика
- момент сопротивления двигателя, работающего в режиме холостого хода. При изменении режима от холостого хода до номинальной нагрузки скорость вращения изменяется незначительно, а характеристика  является почти прямой линией (рис. 6.57).
является почти прямой линией (рис. 6.57).
 , распределена в двигателе следующим образом:
, распределена в двигателе следующим образом: ,
, и
и  - мощность потерь на перемагничивание и вихревые токи магнитопровода статора,
- мощность потерь на перемагничивание и вихревые токи магнитопровода статора, и
и  - мощность потерь на трение и мощность дополнительных потерь соответственно,
- мощность потерь на трение и мощность дополнительных потерь соответственно, - полезная мощность на выходе асинхронного двигателя.
- полезная мощность на выходе асинхронного двигателя. Рис. 6.58
Рис. 6.58
 несколько снижается вследствие уменьшения общего магнитного потока и скорости вращения. Это уменьшение не превышает 4…8 %, и поэтому они отнесены к постоянным потерям в двигателе. Мощности потерь в обмотках статора и ротора пропорциональны квадрату тока, поэтому при увеличении механического момента сопротивления этот вид потерь увеличивается по параболической зависимости.
несколько снижается вследствие уменьшения общего магнитного потока и скорости вращения. Это уменьшение не превышает 4…8 %, и поэтому они отнесены к постоянным потерям в двигателе. Мощности потерь в обмотках статора и ротора пропорциональны квадрату тока, поэтому при увеличении механического момента сопротивления этот вид потерь увеличивается по параболической зависимости. (рис. 6.59)
(рис. 6.59) Рис. 6.59
Рис. 6.59
 при изменении нагрузки может быть достаточно просто проанализировано с помощью круговой диаграммы, проследив изменение угла
при изменении нагрузки может быть достаточно просто проанализировано с помощью круговой диаграммы, проследив изменение угла  при изменении тока
при изменении тока  от
от  до номинального значения.
до номинального значения.
 Рис. 6.60
Рис. 6.60
 нелинейная. Общий вид характеристики представлен на рис. 6.60. Пунктирной линией показана характеристика идеального двигателя, КПД которого равняется единице.
нелинейная. Общий вид характеристики представлен на рис. 6.60. Пунктирной линией показана характеристика идеального двигателя, КПД которого равняется единице.
 .
.
 . Далее при скольженьях
. Далее при скольженьях  характеристика является неустойчивой и двигатель не может работать устойчиво в этом режиме.
характеристика является неустойчивой и двигатель не может работать устойчиво в этом режиме. , ротор вращается против магнитного поля и затормаживается моментом в соответствии с характеристикой. Для увеличения эффективности торможения в цепь ротора двигателя с фазным ротором включают дополнительные сопротивления, переходя на искусственные характеристики, обеспечивающие наибольший тормозной момент.
, ротор вращается против магнитного поля и затормаживается моментом в соответствии с характеристикой. Для увеличения эффективности торможения в цепь ротора двигателя с фазным ротором включают дополнительные сопротивления, переходя на искусственные характеристики, обеспечивающие наибольший тормозной момент.


