При пуске двигателя с фазным ротором уменьшения пускового тока достигают включением дополнительного сопротивления в обмотку ротора. Трехфазная обмотка ротора асинхронных машин обычно соединяется «звездой», и ее концы соединяются с контактными кольцами, расположенными на оси ротора. Щетки, расположенные на статоре и скользящие по контактным кольцам, позволяют подключить к обмотке ротора дополнительные резисторы.
Увеличение сопротивления цепи обмотки ротора вызывает уменьшение пускового тока, уменьшение угла  и, как следствие, изменение механического момента. Несмотря на уменьшение пускового тока при неподвижном роторе, пусковой механический момент может увеличиться, поэтому возможность подключения к обмотке ротора дополнительного резистора имеет большое практическое значение.
и, как следствие, изменение механического момента. Несмотря на уменьшение пускового тока при неподвижном роторе, пусковой механический момент может увеличиться, поэтому возможность подключения к обмотке ротора дополнительного резистора имеет большое практическое значение.
Рассмотрим эффект от включения резистора с теоретической точки зрения.
Максимальное значение момента не зависит от сопротивления обмотки ротора
 .
.
Критическое скольжение, т. е. скольжение, при котором имеет место максимальный момент, пропорционально суммарному активному сопротивлению роторной обмотки
 .
.
Таким образом, увеличение сопротивления ротора приводит к увеличению критического скольжения. При включении в обмотку ротора дополнительного сопротивления
 .
.
Механическая характеристика асинхронной машины при различных величинах дополнительного сопротивления обмотки ротора приведена на рис. 6.40. На рисунке  ;
;  . Две последних кривых относят к искусственным механическим характеристикам.
. Две последних кривых относят к искусственным механическим характеристикам.
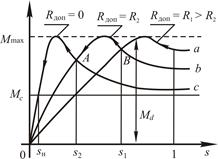
Рис. 6.40
Если механический момент сопротивления больше электромагнитного момента, который двигатель может обеспечить при скольжении, равном единице, двигатель не запустится. Для того, чтобы двигатель развил максимальный момент при пуске ( ), необходимо последовательно с обмоткой ротора включить дополнительное сопротивление
), необходимо последовательно с обмоткой ротора включить дополнительное сопротивление
 .
.
В том случае, если момент сопротивления меньше пускового  , ротор двигателя начнет вращаться и электромагнитный момент, развиваемый им, начнет изменяться в соответствии с кривой
, ротор двигателя начнет вращаться и электромагнитный момент, развиваемый им, начнет изменяться в соответствии с кривой  . Частота двигателя будет увеличиваться при достижении ротором частоты вращения, соответствующей скольжению
. Частота двигателя будет увеличиваться при достижении ротором частоты вращения, соответствующей скольжению  . Для уменьшения времени запуска двигателя необходимо уменьшить сопротивление пускового реостата до величины
. Для уменьшения времени запуска двигателя необходимо уменьшить сопротивление пускового реостата до величины  . При этой величине дополнительного сопротивления двигатель будет работать в соответствии с механической характеристикой, представленной кри-вой
. При этой величине дополнительного сопротивления двигатель будет работать в соответствии с механической характеристикой, представленной кри-вой  . Частота вращения будет увеличиваться. При достижении скольжения
. Частота вращения будет увеличиваться. При достижении скольжения  можно закоротить дополнительный реостат, и двигатель будет работать на естественной механической характеристике «
можно закоротить дополнительный реостат, и двигатель будет работать на естественной механической характеристике « ». В результате частота вращения будет максимальной,
». В результате частота вращения будет максимальной,
и соответствующее ей скольжение  будет минимальным. Когда скольжение достигнет величины
будет минимальным. Когда скольжение достигнет величины  , дополнительное сопротивление необходимо уменьшить до значения . При такой величине дополнительного сопротивления двигатель будет работать в соответствии
, дополнительное сопротивление необходимо уменьшить до значения . При такой величине дополнительного сопротивления двигатель будет работать в соответствии
с механической характеристикой . Исключение дополнительного сопротивления из цепи роторной обмотки переводит работу двигателя на естественную механическую характеристику , и двигатель достигает устойчивой работы при скольжении (см. рис. 6.40).
Схема пуска двигателя представлена на рис. 6.41.
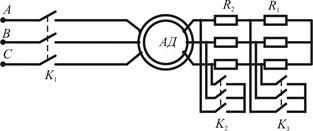
Рис. 6.41
Временная диаграмма срабатывания контактов представлена
на рис. 6.42.

Рис. 6.42
Два трехфазных резистора включены последовательно с обмоткой ротора. Один из резисторов имеет фазное сопротивление ,
а второй - сопротивление  . Суммарное сопротивление реостата равно
. Суммарное сопротивление реостата равно  . Номиналы сопротивлений и рассчитываются на основании приведенных ранее уравнений. При подключении статора двигателя к сети контактором
. Номиналы сопротивлений и рассчитываются на основании приведенных ранее уравнений. При подключении статора двигателя к сети контактором  в момент времени
в момент времени  последовательно с обмоткой ротора включено сопротивление
последовательно с обмоткой ротора включено сопротивление  , так как контакты контакторов
, так как контакты контакторов  и
и  разомкнуты.
разомкнуты.
В момент времени  срабатывает контактор и закорачивает резистор . Последовательно с роторной обмоткой остается включенным сопротивление . В момент времени
срабатывает контактор и закорачивает резистор . Последовательно с роторной обмоткой остается включенным сопротивление . В момент времени  срабатывает контактор . Замыкая свои контакты, он выводит из цепи ротора дополнительные резисторы. Срабатыванием контакторов и управляет датчик скорости, установленный на оси асинхронного двигателя. В некоторых случаях длительность отрезков времени
срабатывает контактор . Замыкая свои контакты, он выводит из цепи ротора дополнительные резисторы. Срабатыванием контакторов и управляет датчик скорости, установленный на оси асинхронного двигателя. В некоторых случаях длительность отрезков времени  и
и  устанавливают расчетным путем, а срабатыванием контакторов и управляет реле времени.
устанавливают расчетным путем, а срабатыванием контакторов и управляет реле времени.




