
Процедура кинематической привязки и выбора гидроцилиндров
Кинематическая привязка гидроцилиндров, как уже указывалось выше, производится в условиях неопределенности, однако всегда существуют ограничения, определяющие область изменения начальных параметров, в которой реализуются решения. Поэтому «привязку» следует начинать определением «условий существования». Ниже приведены примеры определения таких условий для механизмов наиболее часто встречающихся на практике.
Рисунок 9* – Кинематическая привязка гидроцилиндра: А, В, С, С1 – точки крепления гидроцилиндра; lmin – минимальный размер гидроцилиндра; lmax – максимальный размер гидроцилиндра; Hmin – минимальная высота подъема рабочего органа; Hmax – максимальная высота подъема рабочего органа
На рисунке 9, если точка А – произвольно выбранная точка крепления гидроцилиндра, то
или точка крепления должна находиться на отрезке АВ. Это первое условие существования решения. В общем случае, когда Далее, перенесем точку С на верхнее положение рабочего органа в точку С1, сделав засечку раствором циркуля равным Rц = ВС. ВС = ВС1; тогда отрезок Запишем условия существования решения в краткой форме:
Это означает, что, если максимальная длина цилиндра lmax больше АС1, то это приведет к увеличению Hmax, что допустимо в определенных границах. Обратное приведет к уменьшению Hmax, что по условию (задания) недопустимо. Приведенное позволяет сделать следующее заключение: - задачу значительно проще решить графически или графоаналитически; - хотя выбор исходных данных является произвольным, существуют области, в которых находятся все точки возможных решений; - эти области жестко ограничены снизу, и некоторой областью сверху, которая устанавливается из условий практики. Исследуем возможные дальнейшие пути решения. Ниже, на рисунке 10, представлена кинематическая схема фрагмента механизма.
Рисунок 10 – Кинематическая схема механизма
В процессе построения кинематической схемы могут возникнуть следующие ситуации. 1. Хода штока гидроцилиндра недостаточно для подъема рабочего органа на заданную высоту. Переместим точку А крепления цилиндра вверх в точку А¢. Из чертежа (рисунок 10) видно – если перемещать точку крепления С влево ближе к вершине угла В, то необходимый ход штока С²С²1 уменьшается, так как С²С²1 < С¢С¢1; и наоборот, увеличивается, если точку крепления поместить в точку С¢. 2. Ход штока гидроцилиндра велик и высота подъема рабочего органа недопустима. В этом случае, как было показано выше, точку крепления гидроцилиндра следует перенести вправо (в точку С¢). Изложенное позволяет предложить следующую стратегию процедуры вписывания гидроцилиндра. Шаг первый. Строится в масштабе схема механизма (формат не менее А3). Шаг второй. Выбирается по таблицам учебных пособий (произвольно) гидроцилиндр с ходом штока, например, l, не обращая внимания на диаметр. Шаг третий. Определяются максимальный и минимальный размеры гидроцилиндра Lmax и Lmin. Шаг четвертый. Определяется координата точки А (рисунок 10) и опустив перпендикуляр из точки А, находится точка С. Координата точки А определяется из условия
Угол a определяется из графического построения, путем замера. Шаг пятый. Определяется положение С1 (С1В = СВ) и проверяется условие Шаг шестой. В зависимости от ситуации (см. выше, рисунок 10) производится изменение положения точки С1, или А1. Шаг седьмой. Проверяются конструктивные ограничения. В случае если гидроцилиндр вписать не удается, выбирается новый (по величине хода штока) цилиндр и построение (процедура) повторяется. После того как гидроцилиндр вписан по длине, строится расчетная схема. Ее также следует построить на черновике в масштабе. Цель этой работы – определение графическим или графоаналитическим путем необходимых скоростей штока цилиндра и действующих на него усилий со стороны рабочего органа. Ниже (рисунок 11) представлен пример такого решения. Для решения этой задачи необходимо вычертить схему в положении рабочего органа, когда на него действует максимальная нагрузка. В представленном случае, максимальный момент возникает в горизонтальном положении стрелы (рабочего органа).
Рисунок 11 – Схема для определения усилия на штоке гидроцилиндра Условие равновесия (см. рисунок 11) можно представить в виде
где G – вес поднимаемого груза; z – максимальный вылет стрелы;
x – расстояние от шарнира до места крепления гидроцилиндра стрелы.
В этом случае
где
Схема вычерчивается на черновике в масштабе и все линейные размеры и углы определяются из чертежа. Формат чертежа не менее А3.
3.1.3 Определение скорости движения штока гидроцилиндра
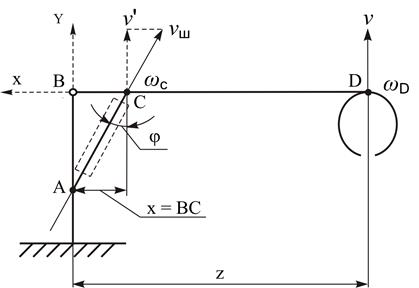
Значение скорости движения штока гидроцилиндра будет необходимо при определении расхода и выборе насоса. Условием равновесия является равенство угловых скоростей в точках C и D (рисунок 12) при повороте вокруг точки B, то есть
Рисунок 12 – Схема для определения скорости движения штока гидроцилиндра Так как
где неизвестными являются Так как для лесных машин скорость рабочего органа находится в пределах v = 0,1 ÷ 0,5; то задаваясь ей, находим:
и
Определив скорость движения штока цилиндра можно определить необходимый расход рабочей жидкости:
где Q – необходимый расход, м3/с; D – диаметр гидроцилиндра, м; v – скорость перемещения штока, м/с.
Определение одновременности работы цилиндров производят, используя построенную ранее циклограмму. При этом, полагаясь на собственный (интуитивный) опыт, предлагают варианты управления и выделяют ситуации с одновременной работой цилиндров.
|

 , т. е.
, т. е.  ;
;  ;
; ; угол
; угол  .
. - это второе условие существования решения.
- это второе условие существования решения. - по теореме «косинусов».
- по теореме «косинусов».
 ;
; . Условие проверяется графически.
. Условие проверяется графически.
 ;
;  ;
;  ,
, - усилие, необходимое для подъема груза;
- усилие, необходимое для подъема груза; и
и  ;
; - усилие на штоке гидроцилиндра.
- усилие на штоке гидроцилиндра. .
.
 ;
; 
 ,
, и
и  .
.
 .
. ,
,


