Компьютерное моделирование алгоритмов управления. Графическое представление результатов моделирования
После проведения оптимизации отдельных контуров системы управления необходимо провести проверку показателей качества всей системы нагрузочного ЭП. Данный режим не принимает во внимание различные нелинейности, присущие системе любого ЭП и предполагает рассмотрение системы в линеаризованном виде. На рисунке 22 представлена структурная схема линеаризованного асинхронного ЭП с векторным управлением на основе имитационной модели АД во вращающейся системе координат с ориентацией по вектору потокосцепления ротора, т.е. в данном случае и система управления, и модель АД, как управляемый объект, находятся в одной и той же вращающейся системе координат. Исследование показателей качества имитационной модели ЭП в представленном виде позволяет проверить работоспособность и оценить взаимное влияние перекрёстных контуров управления потокосцеплением ротора и скорости. На рисунке 22 представлены графики переходных процессов при последовательной подаче задающего сигнала в контуры потокосцепления и скорости. В первую очередь ступенчатый сигнал задания поступает на вход контура потокосцепления, и только по окончании переходных процессов в данном контуре система формирует следующий задающий сигнал для контура скорости. Данная задержка позволяет ещё перед началом движения стабилизировать магнитное состояние АД и способствует приближению переходных процессов по характеру к переходным процессам в ЭП с двигателем постоянного тока независимого возбуждения. В теории асинхронного ЭП задержку с подачей задания в контур скорости подобного вида принято называть начальным намагничиванием. Условия для проведения исследований на рисунке 30 соответствуют пуску ЭП без нагрузки и её последующему набросу в момент времени tнагр = 45 о.е.с моментом mнагр = 1.0 о.е., соответствующем номинальной нагрузке. Анализ переходных процессов применительно к оценке взаимного влияния перекрёстных контуров потокосцепления ротора и скорости показывает, что наибольшее влияние оказывает переходный процесс в контуре скорости, вызывая отклонение потокосцепления ротора от установившегося значения на величину
Рисунок 22 – Переходные процессы в линеаризованном асинхронном ЭПс векторным управлением на базе имитационной модели АД во вращающейся системе координат с ориентацией по вектору потокосцепления ротора Для приближения условий исследования имитационной модели нагрузочного моментного ЭП к реальному объекту следует модернизировать линеаризованную систему с возможностью учёта нелинейностей обусловленных наложением всевозможных ограничений и задатчиков интенсивности. Применительно к нагрузочному моментному асинхронному ЭП следует выделить следующие не линейности: ограничение на выходе регуляторов, линейные задатчики интенсивности в каналах управления потокосцеплением ротора и скоростью, двух массовая механическая система с упругой связью, зазоры в кинематической цепи механической передачи. Используя в качестве основы линеаризованную структурную схему имитационной модели нагрузочного ЭП (рисунок 28) разработаем соответствующую систему с учётом указанных выше нелинейностей. Для проведения исследований и получения предварительной оценки качества функционирования разработанной системы в программной среде Simulink-Matlab создана имитационная модель асинхронного нагрузочного моментного ЭП с векторным управлением.
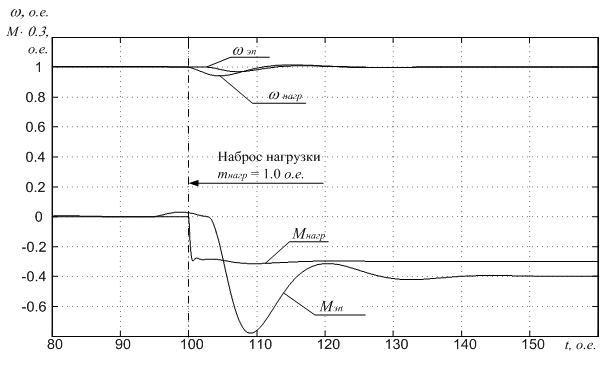
Рисунок 23– Графики переходных процессов в системе нагрузочного моментного ЭП с векторным управлением при учёте нелинейностей для случая работы в режиме движения. На рисунке 23 представлены результаты исследования системы нагрузочного моментного ЭП с векторным управлением при учёте нелинейностей для случая работы в режиме движения. На рисунке 24 представлены графики переходных процессов в имитационной модели моментного асинхронного ЭП при имитации нагрузочных усилий в режиме упора. Анализ графиков переходных процессов на рисунке 30 и рисунке 31 показывает, что нагрузочный моментный ЭП в полном объёме выполняет имитационное формирование усилий, прикладываемых со стороны ЭП лифта и соответствует требованиям, предъявляемым к нагрузочному ЭП при проведении испытаний электроприводов лифтов.
Рисунок 24 –Графики переходных процессов в имитационной модели моментного асинхронного ЭП при имитации нагрузочных усилий ЗАв режиме упора
|
 и
и  . Относительно переходных процессов в контуре потокосцепления, можно заключить, что значительное влияние на отклонения в контуре скорости, как и ожидалось, отсутствует.
. Относительно переходных процессов в контуре потокосцепления, можно заключить, что значительное влияние на отклонения в контуре скорости, как и ожидалось, отсутствует.