
Человек - оператор и РЭС
Человек-оператор является интегральным и определяющим звеном любой системы управления, независимо от степени ее автоматизации. Им принимаются принципиальные решения, он является юридическим лицом. Все это заставляет внимательно подходить к вопросам работы человека с РЭС, изучать и рационально использовать его навыки и способности, создавать для него комфортные условия для работы. 6.1.1. Система «Человек – машина» В соответствии с ГОСТ 21033-75 человека-оператора (Ч-О) рассматривают как осуществляющего трудовую деятельность посредством взаимодействия с машиной и окружающей средой. Эта система получила наименование "Человек-машина". В настоящее время считают, что машине следует отдавать предпочтение: 1) при выработке частных решений на основе общих правил, 2) при математических расчетах по определенным формулам, 3) при выполнении стандартных действий, 4) при необходимости сохранения в оперативной памяти большого количества информации, 5) при быстрых реакциях и значительных усилиях в процессе управления. Если необходимо делать обобщения или формировать решение на основе ограниченной информации, опознать объект в условиях помех, реагировать на случайные и непредвиденные обстоятельства, решать задачи, которые по своему характеру не могут быть алгоритмизированы, то предпочтение отдается человеку. Для правильного использования человека в роли "машины" управления мало знать перечисленные выше общие принципы. Необходимо знать и конкретные особенности работы человека в различных условиях. Эти условия определяются инженерной психологией и принципами эстетического восприятия человеком информации, получаемой при работе с РЭС. 6.1.2. Оператор как "приемник", "ретранслятор" и "анализатор" информации Инженерная психология - наука, рассматривающая Ч-О в виде машины по приему, переработке и выработке информации в виде сигналов разнообразной физической природы. Она изучает: - сенсорный вход (органы чувств или рецепторы человека) и моторный (двигательный) выход Ч-О; - процессы переработки информации и распределение функций между человеком-оператором и машиной; - нормальные и критические условия жизнедеятельности Ч-О. Ч-О и РЭС представляет собой две части комплекса, для нормальной работы которого необходимо их согласование. Поэтому между ними имеется целая система технических устройств, передающих информацию от РЭС к человеку и наоборот. Для действенности этой системы нужно решить вопросы: какое количество информации человек может принять, переработать и передать в единицу времени; какова его "пропускная способность" и предельные скорости различных реакций; какова точность восприятия и выдачи различных сигналов; каково время "задержки" (обработки) сигнала оператором; какова надежность его работы. Все эти вопросы должны решаться под углом зрения "подгонки" РЭС к оператору, а не наоборот. Сложность решения этих вопросов объясняется тем, что прием и переработка информации Ч-О - процессы познавательные, складывающиеся из ощущения, восприятия, представления и мышления. Рассмотрим, как происходит процесс управления РЭС:
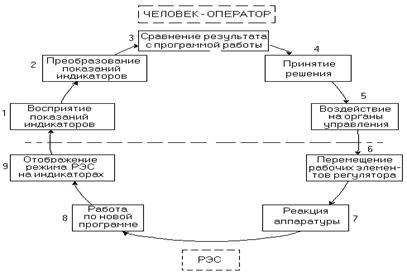
Рисунок 6.1 – Последовательность стадий управления Из рассмотрения процесса управления в системе видно, что Ч-О может выступать в роли "приемника" информации, "ретранслятора" информации от одного звена к другому, "анализатора" информации и исполнителя принятого решения. Он может выполнять программирование работы РЭС, следить за ее состоянием, или быть только исполнителем команд. Во всех случаях основным показателем его работы будут: - время полного цикла регулирования; - точность и надежность работы. Время полного цикла регулирования (оборота сигнала по контуру Ч-О - РЭС) можно представить в виде суммы:
где n - общее количество звеньев; Т0 - время задержки сигнала оператором (от момента поступления сигнала до ответа на него действием). Величина То лежит в пределах 0,1…0,5 с и более, в то время как åti обычно на 2…3 порядка меньше. Время от подачи сигнала до начала движения зависит от модальности ощущения, определяемой возбуждаемым анализатором. Значения этих величин для возбуждения средней интенсивности лежат в пределах: - тактильный анализатор - 0,09…0,22 с, - слуховой анализатор - 0,12…0,18 с, - зрительный анализатор - 0,15…0,22 с, - обонятельный анализатор - 0,31…0,39 с, - болевой анализатор - 0,13…0,89 с. Поэтому общее время, затрачиваемое оператором на получение информации от индикаторов и выполнение ответных действий Т0, можно представить в виде:
где К - количество индикаторов (стрелок, знаков); Dti - время перевода глаз с одного индикатора на другой; Dti - время спонтанной (самопроизвольной) отвлекаемости Ч-О; tc - время выполнения моторных (простых) действий по управлению i -м регулятором; tmi - количество регуляторов РЭС; ni - количество однотипных индикаторов или периодичность наблюдения или регулировки. Для работы с РЭС наиболее характерны дизъюнктивные реакции (реакции выбора) оператора, которые характеризуется необходимостью отвечать действием только на некоторые из сигналов. Длительность таких реакций больше, чем у простых сенсомоторных. Время обращения сигнала по контуру управления можно сократить, если создать оператору нормальные условия работы и натренировать его на управление данным РЭС.
|
 ,
, - время задержки сигнала в i -м звене системы РЭС;
- время задержки сигнала в i -м звене системы РЭС;



