
Неявнополюсный генератор
В ненасыщенной машине магнитная цепь является линейной, поэтому при расчете результирующего магнитного поля можно применять метод наложения. МДС обмотки возбуждения F f создает магнитный поток Ф f, который, сцепляясь с обмоткой статора, наводит в ней ЭДС Eo. МДС обмотки статора Fa1 создает поток реакции якоря Фа и поток рассеяния Фσ. Каждый из этих потоков сцеплен с обмоткой статора и наводит в ней ЭДС Ёа и Eσ соответственно. Сумма ЭДС, действующих в обмотке статора, определяет напряжение генератора за вычетом падения напряжения на активном сопротивлении,
Действующее значение ЭДС холостого хода Еo можно определить по спрямленной характеристике холостого хода (рис. 5.6), а ЭДС реакции якоря Ёа можно выразить через ток якоря I1:
где ха - индуктивное сопротивление реакции якоря. Аналогичные выражения можно получить для ЭДС рассеяния Ёσ
где хσ - индуктивное сопротивление рассеяния обмотки статора. С учетом полученных выражений для ЭДС Еа и Еσ уравнение (5.6) преобразуется к виду
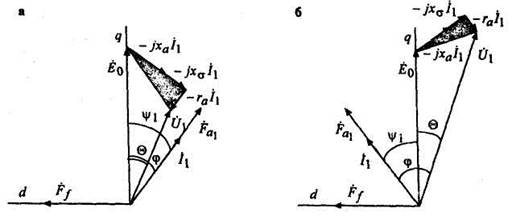
Рис.5.11 где хс - полное индуктивное сопротивление якоря; zc - внутреннее сопротивление генератора. Согласно уравнению (5.7) синхронный генератор можно представить источником ЭДС Ео с внутренним сопротивлением zc (ряс. 5.11). Геометрической интерпретацией этого уравнения являются векторные диаграммы, приведенные на рис. 5.12. Как следует из схемы замещения и векторных диаграмм, в нерегулируемом генераторе (I f = сonst, Eо = const) напряжение Угол Θ между векторами Ёо и U1 называют углом нагрузки. В генераторном режиме вектор Eo всегда опережает вектор U1,и угол Θ считается положительным. При расчетах различных режимов генератора уравнение (5.7) записывают в относительных единицах, принимая в качестве базисного напряжения uб номинальное фазное напряжения UHф., а в качестве базисного тока iб - номинальный фазный ток IHф.. Величина базисного сопротивления zб определяется отношением
Для современных генераторов с неявновыраженными полюсами (турбогенераторы) параметры в относительных единицах имеют следующие значения:
Рис.5.12 При составлении уравнения напряжений ненасыщенного явнополюсного генератор можно также использовать метод наложения. Здесь МДС обмотки возбуждения F f, как как и в случае неявнополюсного генератора, создает поток Ф f, который, сцепляясь с обмоткой статора, наводит в ней ЭДС Eo. Магнитный поток обмотки статора представим в виде суммы трех составляющих -Фаd, Фaq„ и Фσ. Каждый из этих потоков, сцепляясь с обмоткой статора, наводит в вей ЭДС Ead, Ёaq и Eσ соответственно. Напряжение генератора в этом случае будет равно геометрической сумме этих ЭДС минус падение напряжения на активном сопротивлении
Модуль ЭДС Ео определяется по спрямленной характеристике холостого хода (рис.5.6) при заданном значении тока возбуждения I f. Для определения ЭДС реакции якоря Ead и Ёаq разложим ток статора I1 на продольную I1d и поперечную I1q составляющие:
Току I1d соответствует МДС F1d = -F1 sinψ1, определяющая поток продольной реакции якоря, а току I1q соответствует МДС F1q = F1 cosψ1, определяющая поток поперечной реакции якоря. Поэтому выражения для ЭДС Ёаd, и Еаq можно представить в виде
где хad, - индуктивное сопротивление реакции якоря по продольной оси; хaq„ - индуктивное сопротивление реакции якоря по поперечной оси. ЭДС рассеяния определяется полным током статора
Выразив ЭДС Ead, Ёaq„ и Еσ через соответствующие индуктивные сопротивления и токи, преобразуем уравнение (5.8) к виду
Принимая во внимание, что I1 = I1d. +I1q, получим
где xd - полное индуктивное сопротивление якоря по продольной оси; xq - полное индуктивное сопротивление якоря по поперечной оси. Уравнению (5.9) соответствуют векторные диаграммы для активно-индуктивной (рис. 5.13, а) и активно-емкостной (рис. 5.13, б) нагрузки. Так же, как и в неявнополюсном генераторе, напряжение явнополюсного генератора U1 снижается с увеличением активно-индуктивной нагрузки и растет при увеличении активно-емкостной нагрузки. Рис.5.13 Формально уравнение (5.9) можно сметя к уравнению неявнополюсной машины, заменив в нем ток I1d на I1q =I1 – I1d,:
или
Рис.5.14 где EQ Eo-j(xd -xq)I1d - эквивалентная ЭДС явнополюсного генератора. Замена ЭДС Eо на EQ позволяет воспользоваться простой схемой замещения явнополюсного синхронного генератора (рис. 5.14) при аналитических расчетах его режимов работы. Внутреннее сопротивление явнополюсного генератора в этом случае определяется величиной
Рис.5.15 На рис. 5.15 приведена векторная диаграмма, построенная по уравнению (5.10) для активно-индуктивной нагрузки. При упрощенных расчетах ЭДС EQ принимают постоянной, пренебрегая ее изменением при изменении тока I1d. Параметры современных синхронных генераторов явнополюсного исполнения в относительных единицах имеют следующие значения:
|
 (5.6)
(5.6)

 (5.7)
(5.7)
 U1 зависит от величины и характера нагрузки. Если нагрузка активно-индуктивная, то напряжение U1 снижается с увеличением нагрузки вследствие размагничивающего действия поля реакции якоря (рис. 5.12, а). Если нагрузка активно-емкостная, то напряжение генератора U1 возрастает, так как реакция якоря носит намагничивающий характер (рис. 5.12, б). Чтобы поддержать напряжение генератора U1 при изменении нагрузки постоянным, регулируют ток возбуждения I f, увеличивая его при активно-индуктивной нагрузке и уменьшая при активно-емкостной нагрузке.
U1 зависит от величины и характера нагрузки. Если нагрузка активно-индуктивная, то напряжение U1 снижается с увеличением нагрузки вследствие размагничивающего действия поля реакции якоря (рис. 5.12, а). Если нагрузка активно-емкостная, то напряжение генератора U1 возрастает, так как реакция якоря носит намагничивающий характер (рис. 5.12, б). Чтобы поддержать напряжение генератора U1 при изменении нагрузки постоянным, регулируют ток возбуждения I f, увеличивая его при активно-индуктивной нагрузке и уменьшая при активно-емкостной нагрузке.







 (5.9)
(5.9)

 (5.10)
(5.10)






