
Расчет параметров стабилизирующего регулятора
Передаточная функция ПИ-регулятора имеет вид:
Выберем настройки для апериодического регулятора:
Передаточная функция ПИ-регулятора примет вид:
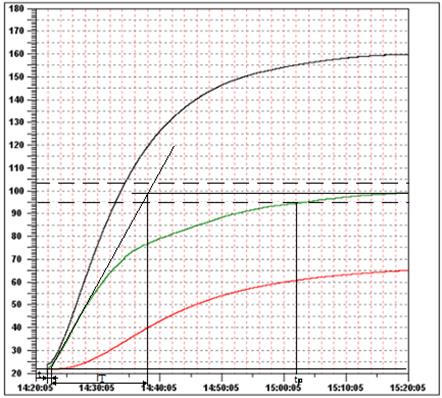
Нахождение параметров передаточной функции объекта корректирующего регулятора из кривой разгона Определим параметры объекта по кривой разгона (рис. 6):
Рис. 6. Определение параметров объекта по кривой разгона Из кривой разгона находим постоянную времени Т, время запаздывания ф, время регулирования tр и коэффициент передачи объекта kоб: Tоб = 940 сек. ф = 40 сек. T’ = T- ф = 900 tр = 2400 сек. Для определения закона регулирования и настроечных параметров регулятора, аппроксимируем кривую разгона передаточной функцией апериодического звена с запаздыванием:
T1 = aЧTоб=0.015Ч940 = 14.1 T2 = bЧTоб=0.955Ч940 = 897.7
Значения a и b находим по номограмме (методичка «Исследование одноконтурной системы автоматического регулирования» рис. 4) исходя из соотношения
Полученная передаточная функция примет вид:
Исходя из требований регулирования, выберем закон регулирования (в данном примере выбран ПИД закон регулирования). Расчет параметров корректирующего регулятора Передаточная функция ПИД-регулятора имеет вид:
Выберем настройки для апериодического регулятора:
Передаточная функция ПИД-регулятора примет вид:
|
 (4)
(4)

 (5)
(5) 





 (6)
(6) (7)
(7) (8)
(8) (9)
(9) 


