Однотактные преобразователи типа ПИ.
При подключении плюсового зажима источника энергии не к катоду диода VD, как это выполнено в схеме рис.6.1, а к минусовому зажиму выходного напряжения будет получен второй основной тип ОПН, который называется полярно-инвертирующим (типа ПИ). Схема силовой части этого ОПН и кривые, поясняющие его работу представлены на рис.6.8.
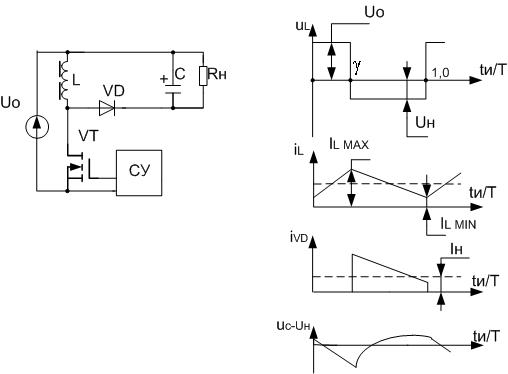
Рассмотрим установившийся режим работы идеального ОПН этого типа для случая безразрывных токов дросселя. При переводе схемой управления СУ транзистора VT в режим насыщения дроссель L оказывается подключенным параллельно источнику энергии U0. На интервале импульса (от 0 до g) к обмотке дросселя приложено напряжение U0, под действием которого он запасает энергию, а ток дросселя нарастает по линейному закону от IL MIN до IL MAX. Диод VD на этом временном интервале закрыт и находится под напряжением (UН +U0).
Передача энергии в нагрузку от источника отсутствует. Ток нагрузки поддерживается за счет разряда конденсатора С. При запирании транзистора ЭДС на зажимах обмотки дросселя меняет свой знак и обеспечивает включение диода VD. На интервале “пуазы” (от g до 1.0) когда транзистор закрыт, ранее запасенная дросселем энергия передается в нагрузку и обеспечивает подзаряд конденсатора. Ток дросселя при этом спадает от IL MAX до IL MIN. Для приращения тока дросселя на интервале паузы DIL = IL MAX - IL MIN справедливо ранее записанное соотношение (6.2). Для граничного случая между режимами безразрывных и разрывных токов
Рис. 6.8. Схема ОПН типа ПИ и временные диаграммы, поясняющие его работу.
дросселя IL MIN в момент окончания периода преобразования принимает нулевое значение. Среднее за период значение тока диода как показано на рис.6.4 равно среднему значению тока нагрузки. Следовательно, для граничного случая можно записать: DIL =2*IН/(1-g). С учетом (6.2) выражение для критической индуктивности Lкр примет следующий вид: Lкр = UН*(1-g)2 /(2*IН *f) (6.10) Выражение для регулировочной характеристики данного ОПН может быть получено из условия равенства нулю среднего за период значения напряжения, приложенного к обмотке дросселя. В соответствии с кривой uL(t) на рис.6.4 в случае идеального ОПН это условие выглядит следующим образом: U0 *g =UН *(1-g) (6.11) Для реального ОПН (без учета коммутационных процессов в транзисторе и диоде) это условие может быть записано в следующем виде: g*(U0 – IН *R1) –(1-g)*(UН +IН *R2)=0, (6.12) где R1 –суммарное значение сопротивления обмотки дросселя, транзистора VT в режиме насыщения и сопротивления источника энергии U0; R2 – суммарное значение сопротивления обмотки дросселя и сопротивления диода VD в открытом состоянии. Выражения для регулировочной характеристики идеального и реального ОПН типа ПИ будут иметь соответственно следующий вид: UН =g*UO/(1-g) (6.13) UН =g*UO/(1-g) –IН *[ R2 + R1*g/(1-g)] (6.14) Если в идеальном ОПН этого типа при изменении g от 0 до 1 выходное напряжение меняется от 0 до бесконечности, то в реальном устройстве тем более при учете коммутационных процессов в транзисторе и диоде существует критическое значение gкр после которого дальнейшее увеличение g начинает приводить не к повышению, а к понижению выходного напряжения. Чем ниже КПД устройства, тем меньше значение gкр. Размах пульсации выходного напряжения DUC можно определить из ниже следующего выражения: DUC = IН *g/f*C, (6.15) где С – емкость выходного конденсатора ОПН. Из сравнения выражений для размаха пульсации в ОПН типа ПИ (6.15) и в ОПН типа ПН (6.9) видно, что при одинаковых параметрах L и C размах пульсации в ОПН типа ПИ оказывается много большим, что является существенным его недостатком. Кроме того, в ОПН типа ПИ к закрытому транзистору и диоду прикладываются большие значения напряжения (UН +U0), поэтому и коммутационные потери в транзисторе и диоде оказываются большими. В связи с выше перечисленными недостатками данный тип ОПН находит крайне редкое применение в источниках электропитания устройств связи.
|