Принцип действия гирокомпаса
Определение азимута ориентирного направления при помощи гирокомпаса сводится к определению гироскопическим способом положения истинного меридиана и вычислению азимута ориентирного направления. Направление истинного меридиана с помощью гирокомпаса находится по наблюдениям колебаний чувствительного элемента. Чувствительный элемент (ЧЭ) (рис. 5, а) представляет собой гиромаятник, т.е. гироскоп, у которого центр тяжести С находится ниже точки подвеса. В маятниковых гирокомпасах главная ось X – X гироскопа совершает гармонические колебания относительно плоскости меридиана. Это явление обусловлено следующими свойствами гироскопа: – главная ось гироскопа X – X стремится сохранить неизменным свое положение в мировом пространстве; – если к оси x – x приложить пару сил F – F (рис. 5, б), то ось гироскопа под действием момента этой пары сил будет поворачиваться (прецессировать) в плоскости Р,перпендикулярной к плоскости N. Направление прецессии будет совпадать с направлением силы F, повернутой на 90° в направлении вращения ротора гироскопа.
Рис. 5. Чувствительный элемент (а) и прецессирование оси гироскопа (б)
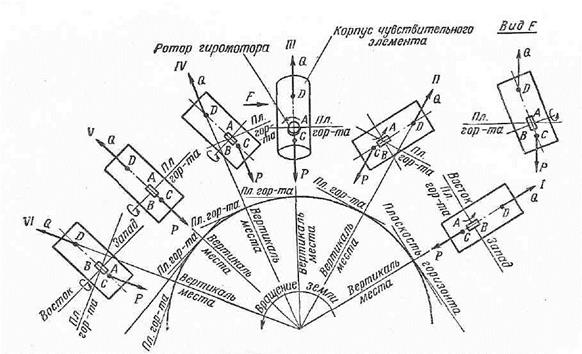
Пусть в начальный момент времени ось гироскопа горизонтальна и расположена в плоскости экватора, т.е. ориентирована в направлении “восток-запад” (рис. 6, положение I). В этот момент линия, проходящая через точку подвеса D и центр тяжести С ЧЭ, совпадает с вертикалью места, т.е. реакция подвеса Q и сила тяжести Р находятся на одной прямой и направлены в противоположные стороны, т.е. не образуют момента.
Рис. 6. Принцип действия маятникового гироскопа Вследствие суточного вращения Земля через некоторый промежуток времени повернется на определенный угол. Ось гироскопа по первому свойству (свойству стабилизации) останется параллельной своему первоначальному положению и займет положение II. В этом случае силы Р и Q образуют момент относительно главной оси гироскопа X – X,который и вызовет прецессию ЧЭ вокруг вертикали, так что конец А будет поворачиваться на нас, т.е. к северу, а конец В – к югу. По мере дальнейшего суточного вращения Земли конец А будет подниматься над плоскостью горизонта, а конец В – опускаться. Величина момента пары сил и скорость поворота чувствительного элемента вокруг вертикали будут увеличиваться и достигнут своего максимального значения, когда ось гироскопа станет в плоскость меридиана (положение III). В этом положении конец А оси гироскопа будет максимально приподнят над горизонтом, а конец В – максимально опущен (вид по стрелке F). По мере дальнейшего вращения Земли ось гироскопа выйдет из плоскости меридиана и займет положение IV. Конец оси гироскопа А будет двигаться на запад, а конец В – на восток. В дальнейшем в связи с вращением Земли концы А и В будут приближаться к плоскости горизонта и, очевидно, наступит такой момент, когда ось гироскопа совпадет с плоскостью горизонта (положение V). В этом положении момент пары сил будет равен нулю, т.е. наступит точка реверсии. По истечении некоторого промежутка времени (в соответствии с первым свойством гироскопа) ЧЭ займет положение VI. В этом положении конец А оси гироскопа уже будет опущен под плоскость горизонта, а конец В будет поднят над горизонтом (противоположно положению II), т.е. чувствительный элемент начнет двигаться (прецессировать) в противоположную сторону. Таким образом, ЧЭ маятникового гирокомпаса будет совершать периодические колебания относительно плоскости меридиана. Период колебаний зависит от широты и температуры окружающей среды (по мере удаления от экватора период колебаний увеличивается). В общем случае прецессионные колебания ЧЭ ввиду наличия различных сил сопротивления, в особенности поддерживающей жидкости, носят затухающий характер и не являются симметричными относительно плоскости меридиана. В процессе определения азимута эти затухания необходимо учитывать, что и предусмотрено методиками определения азимута различными гирокомпасами. В гирокомпасах 1Г9 и 1Г11 отсутствует поддерживающая жидкость, чувствительный элемент подвешен на торсионном подвесе ленточного типа. Для исключения противодействующего момента торсиона на колебания ЧЭ применена следящая система, вследствие чего затухание колебаний ЧЭ сведено к минимуму. В точках, где наблюдатель воспринимает прекращение движения ЧЭ (остановку), ось гироскопа изменяет направление движения на противоположное. Поэтому эти точки и называются точками реверсии. Если на гиромаятник не действуют никакие силы сопротивления, то точки реверсии располагаются симметрично относительно плоскости меридиана. В этих условиях для определения направления истинного меридиана достаточно зафиксировать две смежные точки реверсии и взять среднее между ними. Фиксирование положений точек реверсии осуществляется путем снятия отсчетов по угломерной шкале. Отсчет, соответствующий направлению истинного меридиана, находится как среднее арифметическое из отсчетов по точкам реверсии. Для исключения грубых ошибок и повышения точности средний отсчет, соответствующий направлению истинного меридиана, определяют по трем, а лучше по четырем точкам реверсии. В гирокомпасе 1Г5 чувствительный элемент плавает в жидкости. Жидкостное трение обусловливает затухание колебаний ЧЭ. Это затухание учитывается методикой работы по определению азимута.
|