Описание устройства приборов комплекта гирокомпаса 1Г25
Комплект гирокомпаса 1Г25 предназначен для определения истинного азимута продольной оси объекта. В комплект гирокомпаса 1Г25 (рис. 18) входят: гирокомпас 1, установочный столик 2, блок преобразования информации 3, пульт управления 4, блок питания 5, УАФ 6, призма 7, кабели и ЗИП.
Рис. 18. Комплект гирокомпаса 1Г25: 1 – гирокомпас; 2 – установочный столик; 3 –блок преобразования информации; 4 – пульт управления; 5 – блок питания; 6 – УАФ; 7 – призма.
Принципиальная схема и конструкция гирокомпаса предусматривает определение Аист по электрическому каналу блока преобразования информации и управления (БПИУ), а также по визуальному каналу гирокомпаса путем фиксации двух точек реверсии прецессионных колебаний ЧЭ и последующего расчета положения динамического равновесия ЧЭ с учетом поправки гирокомпаса.
Основными узлами гирокомпаса являются гироузел 1 и визирная головка 2 (рис. 19). Гироузел предназначен для определения Аист, а визирная головка – для снятия показаний по визуальному каналу и автоколлимационной привязки к контрольному элементу (КЭ) установочного столика. Рис. 19. Принципиальная схема гирокомпаса 1Г25: 1 – визирная головка; 2 – гироузел; 3 – подвижная часть гирокомпаса; 4 – 13-разрядный преобразователь; 5 – червяк; 6 – привод следящей системы; 9 – торсион; 10 – трегер; 11 – неподвижная часть; 12 – датчик угла; 13 – токоподвод; 14 – СК; 15 – кольцо контактное; 16, 17 – основания; 18 – маховичок; 19 – подшипники; 20 – гиромотор; 21 – редуктор; 22 – двигатель; 23 – винт; 24 – ЧЭ; 25 – редуктор; 26 – хомутик; 27 – колесо коническое; 28 – подшипник; 29 – каретка; 30 – колесо цилиндрическое прямозубое; 31 – лимб; 32 – зрительная труба; 33 – экран; 34 – марка; 35 – визир. В гироузле в подшипниках 19 (рис. 19) наружного корпуса закреплен следящий корпус (СК) 14, в верхней части которого находятся каретка 29 и лимб 31. К каретке подвешен на торсионе 9 чувствительный элемент 24. Для устранения момента закрутки торсиона, возникающего при прецессионных колебаниях ЧЭ, а также для приведения в согласованное положение ЧЭ и следящего корпуса в каждый момент времени служит следящая система. Объектом регулирования является следящий корпус (рис. 20), который приводится во вращение исполнительным двигателем Д через редуктор сигналом с датчика угла следящей системы (ДУСС).
ДУСС предназначен для преобразования угла рассогласования между СК и ЧЭ в электрический сигнал. Рис. 20. Структурная схема следящей системы
При согласованном положении СК и ЧЭ на выходе ДУСС сигнал равен нулю, т.е. электрическая мостовая схема, двумя плечами которой являются фоторезисторы 5 и 11 (рис. 21), сбалансирована. При повороте ЧЭ образуется угол рассогласования между ЧЭ и СК, в результате чего происходит перераспределение световых потоков, поступающих на фоторезисторы. Перераспределение световых потоков вызывает разбалансировку моста и в его диагонали появляется сигнал φ; (рис. 20), пропорциональный смещению луча, т.е. углу рассогласования между ЧЭ и СК. Этот сигнал после усиления поступает на управляющую обмотку исполнительного двигателя Д, который через редуктор Z разворачивает СК в согласованное положение с ЧЭ, т.е. отрабатывает угол рассогласования. Для улучшения динамической характеристики в следящей системе применена отрицательная обратная связь (ОС) по ускорению. Сигнал, пропорциональный скорости движения СК, от тахогенератора ТГ, находящегося на одном валу с исполнительным двигателем Д, поступает через элементы ОС на один из входов сумматора С, на второй вход сумматора подается сигнал от ДУСС. Элементы ОС обеспечивают необходимые фазовые соотношения между сигналом на выходе ДУСС и сигналом обратной связи. Суммарный сигнал с сумматора поступает на вход усилителя У, который усиливает его до величины, необходимой для работы двигателя Д.
Рис. 21. Оптическая схема датчика угла следящей системы: 1, 3 – зеркала; 2, 4 – объективы; 5, 11 – фоторезисторы; 6, 10 – призмы; 7 – лампа; 8 – конденсор; 9 – разделительная призма.
Для съема информации о положении ЧЭ по электрическому каналу на валу червяка 5 (рис. 19) привода следящей системы 6 установлен 13-разрядный преобразователь 4, сигналы с которого поступают в блок преобразования информации и управления (БПИУ). На следящем корпусе гироузла расположены контактные кольца 15 для передачи напряжений питания и сигналов управления, а также механизм арретира, который арретирует ЧЭ после окончания работы гирокомпаса. Наружный корпус гироузла состоит из двух частей. Неподвижная часть 11 жестко крепится на трегере 10, а верхняя подвижная часть 3 с закрепленной на ней визирной головкой 1 может вращаться в подшипнике 28 относительно трегера. При вращении следящего корпуса подвижная часть и визирная головка жестко соединяются с трегером хомутиком 26 при помощи редуктора 25 механизма захвата. На визирной головке расположены экран 33, позволяющий снимать отсчеты по лимбу, и зрительная труба 32, предназначенная для привязки к КЭ и визирования на предметы. Грубое наведение зрительной трубы визирной головки в горизонтальной плоскости осуществляется двигателем привода следящей системы 6. При этом следящий корпус и трегер жестко соединяются между собой хомутиком 26 механизма захвата. Установочный столик предназначен для крепления и горизонти-рования гирокомпаса на объекте. Он состоит из колец 6, 7, 8 (рис. 22). Зеркало в оправе, установленное на внутреннем кольце 7, является КЭ. Призма 7 (рис. 18) устанавливается в направляющие пазы установочного столика и служит для передачи автоколлимационного изображения сетки зрительной трубы.
Рис. 22. Гирокомпас на установочном столике: 1 – зрительная труба; 2 – уровни; 3 – маховички; 4 – винты; 5 – кронштейны; 6, 7, 8 – кольца; 9, 10 – винты; 11 – проекционный канал; 12 – фиксатор; 13 – кронштейн.
Блок преобразования информации (БПИ) предназначен для автоматического вычисления Аист, заданного направления с учетом формулярной поправки гирокомпаса и выдачей значения этого азимута на световое табло. На передней панели БПИ расположены: – кнопка “СБРОС” для приведения в исходное состояние схемы БПИ; – тумблер “ВЛЕВО”, “ВПРАВО” для предварительного ориенти-рования следящего корпуса; – переключатели “ТЫСЯЧИ ДУ”, “СОТНИ ДУ” для набора значения угла предварительного ориентирования следящего корпуса; – тумблер “АВТОМАТИЧЕСКАЯ ФИКСАЦИЯ ТОЧЕК РЕВЕРСИИ” для включения БПИ в автоматический режим работы; – световое табло для индикации определяемого азимута; – под крышкой “ВВОД ПОПРАВКИ” расположены 14 тумблеров для набора формулярной поправки гирокомпаса. Устройство амортизационно-фиксирующее (УАФ) предназначено для уменьшения механических перегрузок, действующих на гирокомпас и установочный столик при движении объекта, а также для фиксации гирокомпаса при работе на стоянке. На пульте УАФ расположены лампы “ТРАНСПОРТИРОВКА” и “РАБОТА”. Блок питания (БП) предназначен для обеспечения комплекта гирокомпаса необходимыми напряжениями питания. Блок питания состоит из корпуса 1 и крышки 3 (рис. 23). К корпусу крепится плата 4, на которой установлен кронштейн с электроэлементами 2.
а – общий вид; б – устройство; 1 – корпус; 2 – кронштейн с электроэлементами; 3 – крышка; 4 – плата; 5 – плата с трансформаторами; 6 – преобразователь ПТ-125Ц 3-й серии.
В корпусе блока питания закреплены плата с трансформаторами 5 и преобразователь 6. На боковой стенке корпуса расположены два предохранителя, два разъема для подключения кабелей от источника питания и блока управления и шпилька ЗЕМЛЯ, соединенная с корпусом блока. Пульт управления (ПУ) предназначен для управления гирокомпасом и состоит из коммутационных и исполнительных устройств. На передней панели ПУ расположены: – вольтметр для контроля напряжения; – переключатель “КОНТРОЛЬ – РАБОТА” для включения комплекта в соответствующий режим; – кнопки и лампы “РАЗАРРЕТ”, “ЗААРРЕТ” для управления и индикации режимами работы механизма арретира гирокомпаса; – кнопки “ВЛЕВО”, “ВПРАВО”, тумблер “МЕДЛЕННАЯ СКОРОСТЬ” и ручка “РЕГУЛИРОВКА” для разворота визирной головки при привязке к контрольному элементу; – лампы “I фаза”, “II фаза”, “III фаза” для защиты цепей токоподводов от токовых перегрузок и индикации режима работы гиромотора; – предохранители 2 А и 5 А.
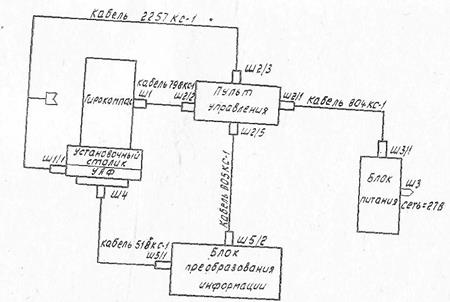
Рис. 24. Структурная схема комплекта гирокомпаса 1Г25
Кабели предназначены для электрических соединений блоков комплекта гирокомпаса 1Г25 (рис. 24). ЗИП служит для устранения мелких неисправностей оператором при работе с комплектом и его техническом обслуживании.
|
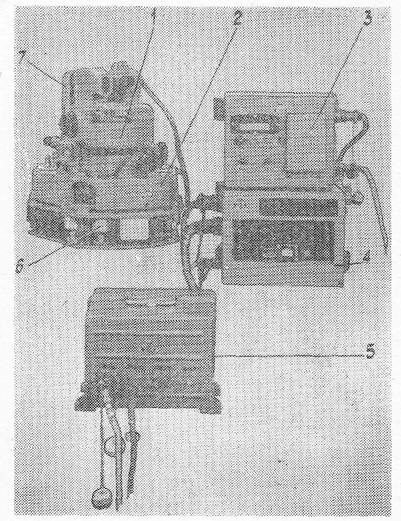
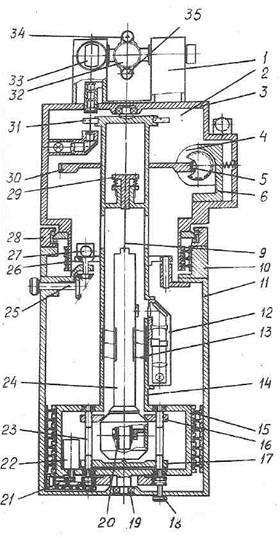
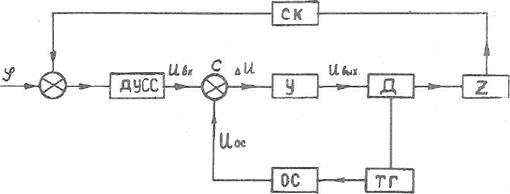
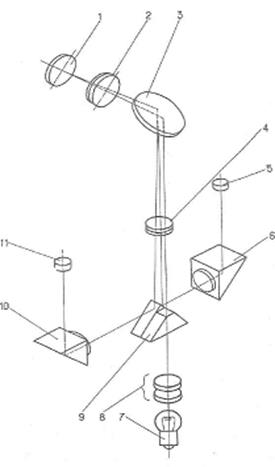
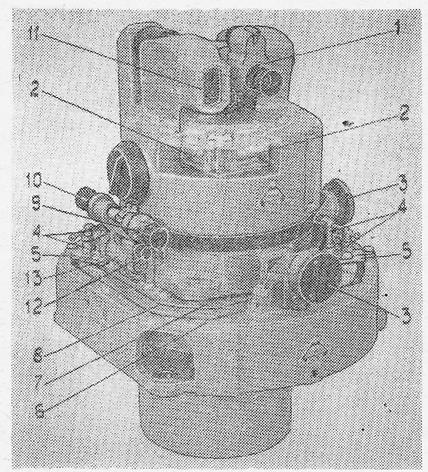
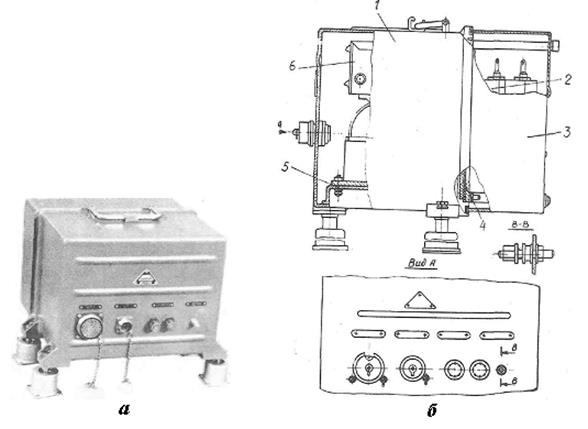 Рис. 23. Блок питания:
Рис. 23. Блок питания: