Позиционные регуляторы - регул-ры, у кот.выходная величина при непрерывн. измен. входной величины,может принимать только 2 устойч.состояния. При этом исполнительный механизм обеспечивает мгновенное перемещение из состояния «открыто»в «закрыто» и наоборот. Они просты по конструкции и надёжны в работе. Статич. характеристика регуляторов выражается:
 µ-входная величина регулятора,
µ-входная величина регулятора,  -заданное значение регулируемого парметра, х-входная величина. Величина 2σ наз. зоной нечувствительности
-заданное значение регулируемого парметра, х-входная величина. Величина 2σ наз. зоной нечувствительности





 - статическая характеристика
- статическая характеристика
σ σ


 0 х
0 х
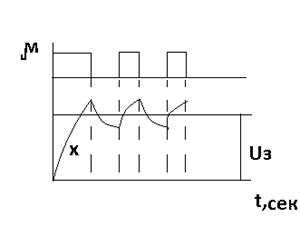 Переходный процесс в системе с позицион.регуляторами(динамич.хар-ка):
Переходный процесс в системе с позицион.регуляторами(динамич.хар-ка):
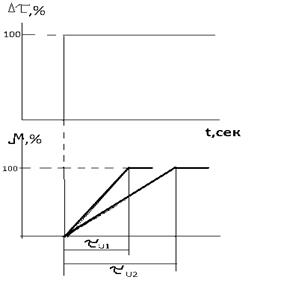
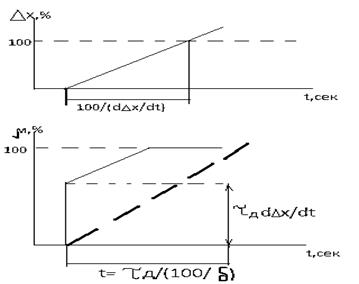
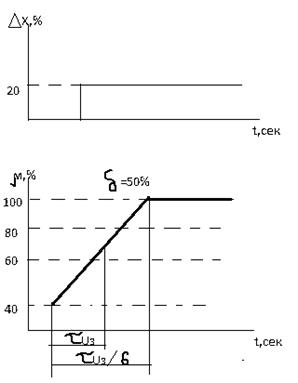
Интегральные – регул-ры,в кот.входная величина влияет на скор.изменения выходной вел-ны. «+»: отсутствие статической ошибки, «-»: низкое быстродействие,можно применять только на объектах с самовыравниваем.
Ур-ние динамики:  , где
, где  -постоянная интегрирования,явл-ся настроечным параметром регулятора и представляет собой время, за кот.выходная величина изменяется на 100% при 100% изменении входн.величины,
-постоянная интегрирования,явл-ся настроечным параметром регулятора и представляет собой время, за кот.выходная величина изменяется на 100% при 100% изменении входн.величины,  – отклонение от заданного значения.
– отклонение от заданного значения.
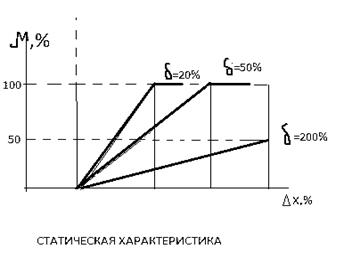
Пропорциональные-рег-ры, в кот. выходная вел-на изменяется пропорц-льно рассогласованию в пределах зоны регулирования, т.е.  , где σ - предел пропорц-сти - величина входного сигнала, выраженная в %,по действием которой выходной сигнал изменяется от 0 до 100%.
, где σ - предел пропорц-сти - величина входного сигнала, выраженная в %,по действием которой выходной сигнал изменяется от 0 до 100%.
Вне предела пропорциональности(который является настроечным параметром) выходной сигнал = 0 или 100%. «+» регуляторов: выс.быстродействие, можно применять с объектами без самовыравнивания. «-»: статическая ошибка,кот.растёт с увелич.пропорциональности.
Пропорционально-интегральные регуляторы объединяют «+» пропорцион.и интегральных регуляторов. Ур.динамики:

 , где
, где  -постоянная времени интегрирования(время изодрома)-время,за кот.выходная вел-нарегулятора под действием интегральной части изменится на такую же вел-ну,как и под действием пропорц-ной части,если предел пропорц-сти=100%
-постоянная времени интегрирования(время изодрома)-время,за кот.выходная вел-нарегулятора под действием интегральной части изменится на такую же вел-ну,как и под действием пропорц-ной части,если предел пропорц-сти=100%
 Для улучшения качества регулирования в закон регулирования вводят дифференциальную (Д) составляющую, что позволяет повысить воздействие при удалении регулируемой вел-ны от заданного значения и наоборот, т.к. Д-составляющая пропорц-на скор. изменения входной величины,всё это приводит к уменьшению времени регулирования. Ур.динамики:
Для улучшения качества регулирования в закон регулирования вводят дифференциальную (Д) составляющую, что позволяет повысить воздействие при удалении регулируемой вел-ны от заданного значения и наоборот, т.к. Д-составляющая пропорц-на скор. изменения входной величины,всё это приводит к уменьшению времени регулирования. Ур.динамики:  ,
,  -время дифференцирования(предварения). При изменяющейся с постоянной скоростью вх. величине, вых. величина µ скачкообразно изменится под действием Д-составл-щей и далее будет измен.с постоян.скор. под действием пропорциональн.(П)составляющей. Интенсивность Д-составл-щей определяется настройкой времени, на кот.вых.величина ПД-регулятора опережает его П-составляющую при изменении вх.величины с постоян.скор. и пределом пропорц-сти 100%
-время дифференцирования(предварения). При изменяющейся с постоянной скоростью вх. величине, вых. величина µ скачкообразно изменится под действием Д-составл-щей и далее будет измен.с постоян.скор. под действием пропорциональн.(П)составляющей. Интенсивность Д-составл-щей определяется настройкой времени, на кот.вых.величина ПД-регулятора опережает его П-составляющую при изменении вх.величины с постоян.скор. и пределом пропорц-сти 100%
Наиб. эффективным явл. пропорционально-интегрально-дифференциальн. з-н регулирования, в кот. вводится U-составляющая,пропорциональная скорости изменения вх.величины.Ур.динамики:µ= 




