Синтез корегуючої ланки ЛАЧХ
Виконати синтез послідовного корегуючого пристрою, який забезпечить для скорегованої САК максимальне перерегулювання σm ≤ 10%, tрк≤0,5tрз, (tрз - час регулювання початкової САК), похибку в усталеному режимі εуст=0, статичний коефіцієнт підсилення замкненої САК К=1. Спростити передатну функцію WK(s) корегуючого пристрою. САК задана передатними функціями та структурою схемою: W1(s) =(s+0.16)/(s+0.01), W2(s) =0.25/(150*s2+5*s+1)

Рис.1 Структурна схема початкової САК
а) передатна функція розімкненої системи: Wp(s):=W1(s)*W2(s); Wp(s)=
б) передатна функція замкненої системи:
Для побудови перехідного процесу системи, визначимо перехідну характеристику методом зворотного перетворення Лапласа:
За таблицями зворотного перетворення Лапласа знайдемо:
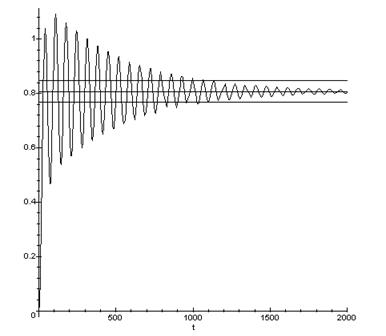
Оцінимо межі зміни одержаних функцій: Перехідна характеристика:
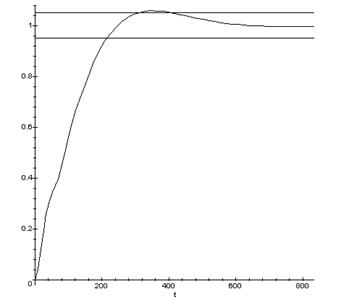
по графіку перехідної характеристики визнаємо прямі показники якості САК. - - максимальне перерегулювання
h(t)mas:=1.091; h(t)уст:=0.807 - час виходу на режим - час досягнення першого максимуму - період коливань T»68сек; - кількість коливань за час регулювання N=15; - декремент згасання
Рисунок 2 - Перехідна характеристика початкової САК
2. Синтез послідовного корегуючого пристрою Синтез послідовного корегуючого пристрою можна виконати за допомогою метода логарифмічних частотних характеристик та методом стандартних перехідних характеристик. Метод логарифмічних частотних характеристик є наближеним, графоаналітичним, не трудомістким. Він ґрунтується на однозначному зв’язку частотних та часових характеристик стійкої лінійної системи Метод стандартних перехідних характеристик ґрунтується на використанні стандартних перехідних характеристик, побудованих за нормованими передатними функціями замкнених САК. Ці передатні функції сформовано відповідно до обраних за певними правилами коренів характеристичного рівняння та вимог до порядку астатизму системи. Визначимо корегуючий пристрій лінійної САК за допомогою логарифмічних частотних характеристик. Для цього спочатку побудуємо асимптотичну ЛАЧХ розімкненої системи Lp(w) без урахування невідомого корегуючого пристрою, передатна функція якої
Розкладемо чисельник на складові:
тоді
Передатна функція представляє собою добуток чотирьох найпростіших ланок:: W1(s) – безінерційна ланка, W2(s) – форсуюча першого порядку, W3(s) – інерційна першого порядку, W4(s) - коливальна ланка. Побудуємо асимптотичні ЛАЧХ для кожної ланки окремо, а результуючу Lp(w) одержимо шляхом їх графічного додавання.
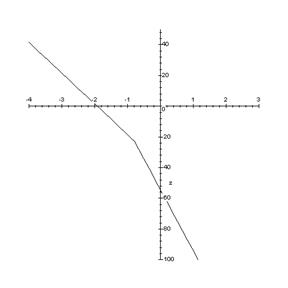
Рисунок 3 - Асимптотичні ЛАЧХ кожної ланки та розімкненої САК
Визначимо частоту зрізу wз для ЛАЧХ бажаної системи LБ(w) за допомогою номограм В.В.Солодовнікова, при заданому значені σm≤10%. Задаємо значення sm = 6 % < 10%, і знаходимо, що значення wзtP =6.5, при умові що, tрк≤0,5tрз, tрз = 1070с, tрк =535с, знаходимо wз=6,5/tрк=6,5/535=0.012 с–1. Формуємо середньочастотну область бажаної ЛАЧХ, відповідно до наступних вимог: LБ (w) перетинає вісь lg w на частоті wз = 0,012с-1; ширина середньочастотної зони повинна бути не меншою за 1,5... 2 декади; нахил характеристики має бути -20 дб/дек. Високочастотна область LБ (w) суттєво не впливає на динаміку САК, тому для спрощення корегуючого пристрою оберемо нахил LБ (w) після w =0,1 такий же, як і LР (w), тобто -40 дб/дек. ЛАЧХ низькочастотної області сформуємо із наступних міркувань. Якщо задається eуст =0, то система повинна бути астатичною і нахил бажаної ЛАЧХ в низькочастотній області вибирають -20 дб/дек. На цьому завершується побудова бажаної ЛАЧХ системи LБ (w), яка наведена на рисунку 4.
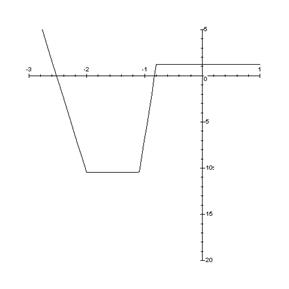
Рисунок 4 – Асимптотична ЛАЧХ бажаної САК
За відомими LБ (w) та LР (w) визначаємо ЛАЧХ корегуючого пристрою LК(w) шляхом графічного віднімання: LК (w) = LБ (w)-LР(w). Одержана характеристика показана на рисунку 5
Рисунок 5 - Асимптотична ЛАЧХ корегоючого пристрою
Визначимо передатну функцію корегуючого пристрою. Прослідкуємо за змінами LК(w) при збільшенні w від мінімального значення до максимального. На частотах w<w1=10-2.5=0,003с-1 ЛАЧХ має такий же вигляд, як і ЛАЧХ ідеальної інтегрувальної ланки з передатною функцією Зміну нахилу результуючої характеристики з -20 дб/дек на 0 дб/дек на частоті w2=0,012 с-1 може забезпечити форсуюча ланка першого порядку з Wk2(s)=Тk2s+1, де Тk2=1/w2=83с. При зростанні w, на частоті w3 =0,08 с-1 знову спостерігається зміна нахилу характеристики від 0 дб/дек до +40 дб/дек. Такий хід ЛАЧХ може забезпечити форсуюча ланка другого порядку із передатною функцією При частоті w4=0,16с-1 знову спостерігається зміна нахилу характеристики від +40 дб/дек до 0 дб/дек. Такий вигляд ЛАЧХ може забезпечити коливальна ланка із передатною функцією Таким чином LК (w) представляє собою, суму ЛАЧХ чотирьох ланок: ідеальна інтегрувальна ланка, форсуюча першого порядку, форсуюча ланка другого порядку, коливальна ланка. Тоді передатна функція корегуючого пристрою знаходиться як добуток:
Передатна функція корегуючого пристрою, вийшла надзвичайно громіздкою, тому необхідно її спростити. Для цього, побудуємо логарифмічну амплітудно-частотну характеристику пристрою Lк (ω). Виконаємо заміну s=jω у WK (s) і за відомими правилами виділимо дійсну P(ω) та уявну Q(ω) частини одержаного виразу і знайдемо формулу для побудови ЛАЧХ, при умові, що 0<x<1, задаємо значення x=0,5.
Графік логарифмічної амплітудно-частотної характеристики пристрою Lк(ω) зображено на рис.6
Рисунок 6 - ЛАЧХ корегоючого пристрою
Виконаємо апроксимацію одержаної характеристики лініями стандартного нахилу (-20дб/дек та +20дб/дек) і одержимо апроксимовану ЛАЧХ Lа (ω). Вона розкладається на суму ЛАЧХ трьох ланок – ідеальної інтегруючої, форсуючої другого порядку та інерційної першого порядку. Тоді Lа(ω) відповідає передатна функція
де Т1 і Т2 Т3 визначаються із графіка, коефіцієнт приймемо рівним x=0,5. Знайдемо постійні часу w1=0.003 T1=1/w1»333, w2=0.04, T2=25, w3=0.8 T3=1.25. Побудуємо спільно ЛАЧХ корегуючого пристрою і ЛАЧХ апроксимованого керуючого пристрою:
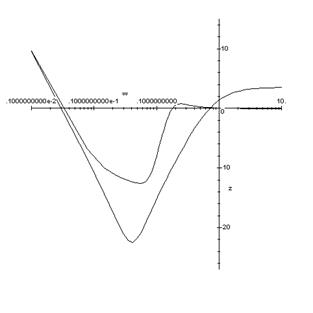
Рисунок 7 - ЛАЧХ корегоючого пристрою і апроксимованого керуючого пристрою
Максимальне відхилення Lа (ω) від LЗ (ω) складає приблизно 10 дб і ширина піку складає близько 0.5 декади. В цьому випадку досягти більшої точності апроксимації можна підбором коефіцієнта коливальності ξ, приймемо ξ=0,95.
тоді
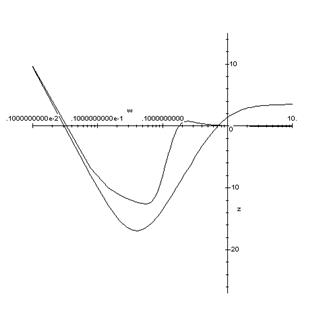
На рисунку 8 побудована ЛАЧХ Lс (ω) для спрощеного корегуючого пристрою, яка мало відрізняється від заданої LЗ (ω).
Рисунок 8 - ЛАЧХ корегоючого пристрою і апроксимованого керуючого пристрою при ξ=0,95.
Побудуємо перехідний процес для системи із спрощеним корегуючим пристроєм. Запишемо передатну функцію САК, з врахуванням корегуючого пристрою. Передатна функція розімкненої системи без врахування корегуючого пристрою Передатна функція корегуючого пристрою Передатна функція замкненої системи з врахуванням корегуючого пристрою:
Для побудови перехідного процесу системи, визначимо перехідну характеристику методом зворотного перетворення Лапласа:
Після математичних перетворень та спрощень, за таблицями зворотного перетворення Лапласа знайдемо:
Оцінимо межі зміни одержаних функцій: Перехідна характеристика: По графіку перехідної характеристики визнаємо прямі показники якості САК з корегуючим пристроєм.
Рисунок 9 – Перехідна характеристика САК, із спрощеним корегуючим пристроєм - час регулювання - максимальне перерегулювання
h(t)mas:=1.06; h(t)уст:=1 В результаті роботи створена САК з наступними параметрами: час регулювання
|























 ;
;  ; максимальний час для розрахунку визначимо за найменшим показником степені експоненти 0,002 як
; максимальний час для розрахунку визначимо за найменшим показником степені експоненти 0,002 як
 =1070сек;
=1070сек; :
:
 - час від початку процесу до першого досягнення ним значення
- час від початку процесу до першого досягнення ним значення  ,
,  =110сек;
=110сек; характеризує інтенсивність зменшення амплітуди коливань:
характеризує інтенсивність зменшення амплітуди коливань:




 , Tk1=1/0.003»333c.
, Tk1=1/0.003»333c. , де Тk3=1/w3 =12.5с.
, де Тk3=1/w3 =12.5с. , де Тk4=1/w4 =6,25с.
, де Тk4=1/w4 =6,25с. .
.

 ,
,
 .
.





 .
.