
Описание Технологического процесса
Иллюстрация 13:Процедура назначения равновесного состояния
Пример
Иллюстрация 15: Пример процедуры назначения равновесного состояния (BPR функция a =1, b =2) Иллюстрация 31 показывает, как технологический процесс равновесного состояния работает на примере сети. Интенсивность, определяемая в Главе 2.4.3.2 в технологическом процессе возрастающего назначения, здесь используется как стартовое решение. Это стартовое решение охватывает два маршрута, каждый из которых переполнен с 1000 автомобильных поездок. Определяется абсолютное отклонение - значение пяти элементов (составляющих) импеданса, и относительное отклонение с установленным значением 0.1 %. Тогда выполняются следующие шаги, основанные на стартовом решении: Сеть, балансирующая для стартового решения: интенсивности маршрутов 1 и 2 изменены таким образом, что отклонение импеданса двух маршрутов ниже указанного отклонения. Это гарантируется интенсивностью 776 и 1224 транспортных единиц для маршрутов 1 и 2. • поиск маршрута для итеративного шага 1: после балансирования сети из маршрутов 1 и 2, находится самый короткий путь первого итеративного шага, определяющий маршрут 3. • балансирование сети для итеративного шага 1: три маршрута попарно уравновешиваются до тех пор, пока импеданс всех маршрутов не придет в соответствие (согласуется) указанному отклонению. Дело обстоит так в примере, если: • абсолютное отклонение между максимальным и минимальным полным сопротивлением меньше чем 5 секунд или • относительное отклонение между максимальным и минимальным полным сопротивлением меньше чем 0.1 % Попарная балансировка сети всегда изменяет интенсивность маршрута с минимальным и маршрута с максимальным импедансом. • поиск маршрута итеративного шага 2: никакой новый маршрут не найден, технологический процесс равновесного состояния заканчивается. В вышеупомянутом примере полное сопротивление маршрута следует из суммы импеданса связей маршрута. Предполагается, что полное сопротивление равно текущему времени движения, tcur, и что текущее время движения вычислено, при помощи функции сдержанности пропускной способности BPR при a =1, b =2 и c =1.
|
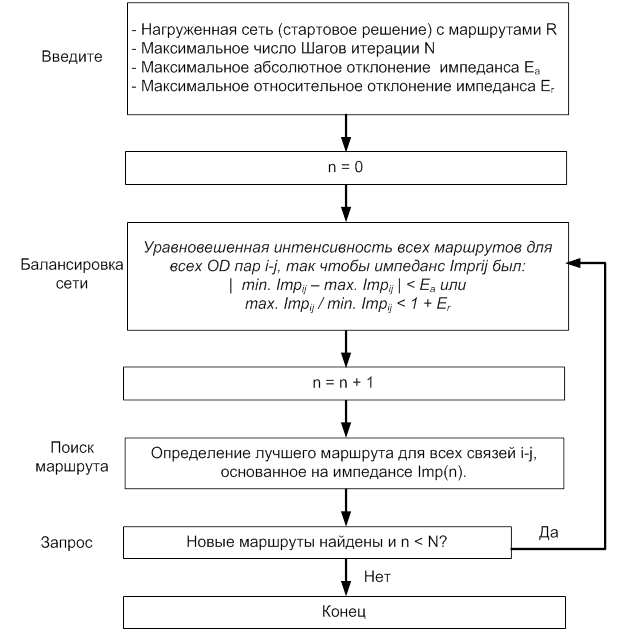
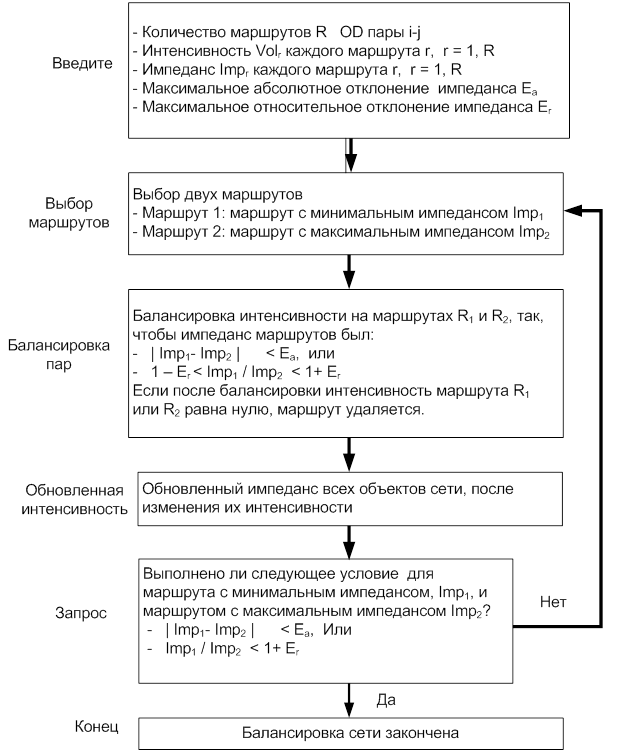 Иллюстрация 14: Технологический процесс процедуры назначения равновесного состояниядля балансировки сети на пару OD.
Иллюстрация 14: Технологический процесс процедуры назначения равновесного состояниядля балансировки сети на пару OD.


