Создание 3D анимации
Манипулятор РПМ-25.01 имеет 7 степеней подвижности. Одно поступательное движение, 5 вращательных, 1 движение 2-х частей хвата по дуге. Все движения робота будут продемонстрированы на видео приложенному к курсовому проекту. Ниже, на рисунке 22 показаны переменные, которые соответствуют параметрам анимации. Эти параметры соответствуют движения манипулятора.
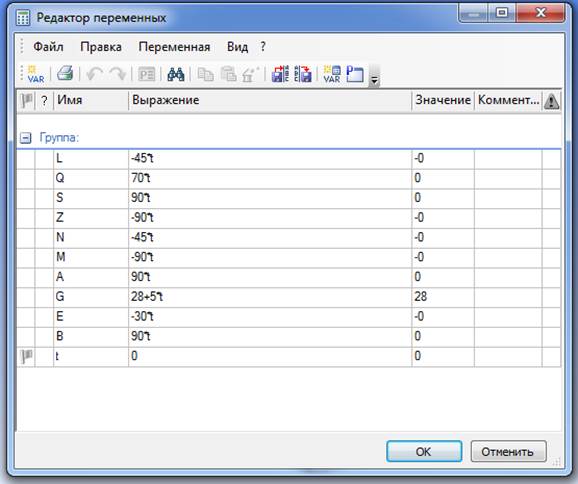
Рис. 22 Список переменных
Параметр t изменяется в промежутке от 0 до 1. При t=1 робот достигает максимума своих геометрических характеристик. Шаг и количество кадров в секунду ставятся по желанию.
1) Переменная G соответствует перемещению X 2) Переменная L соответствует повороту Q1 3) Переменная E соответствует повороту Q2 4) Переменная B соответствует повороту α1 5) Переменная M и N соответствует повороту β 6) Переменная Q соответствует повороту α2 7) Переменные S и Z соответствует движению захвата
|