Определение настроечных параметров ПИ-регулятора
kp – коэффициент усиления ПИ-регулятора; Tp – постоянная времени ПИ-регулятора. Рис. 10. Определение постоянной времени ПИ-регулятора по ЛАЧХ системы, для которой выполнены требования к запасам устойчивости по фазе и амплитуде. Частота точки сопряжения касательных с наклоном 0 дБ/дек и -20 дБ/дек является обратной величиной к искомой постоянной времени ПИ-регулятора. 1/Т = 0.18 рад/сек. Т = 5.6 сек.
Введение ПИ-регулятора в контур управления.
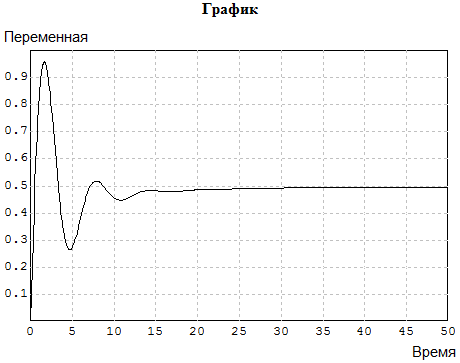
Рис. 11. САР с ПИ-регулятором. Рис.12. Переходная характеристика Установившееся значение ошибки регулирования равно нулю. В общем САР имеет уже неплохое качество.
В завершение приведем ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР: Рис. 13. ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР. Запасы устойчивости и по фазе и по амплитуде – хорошие. Переходная характеристика разомкнутого контура линейно увеличивается со временем, что объясняется наличием интегратора в контуре, входящего составной частью в ПИ-регулятор. Показатели качества установившегося режима.
Рис. 14. Диаграмма для определения коэффициента ошибки по скорости астатической САР.
Коэффициент ошибки по скорости с1=0.49
|

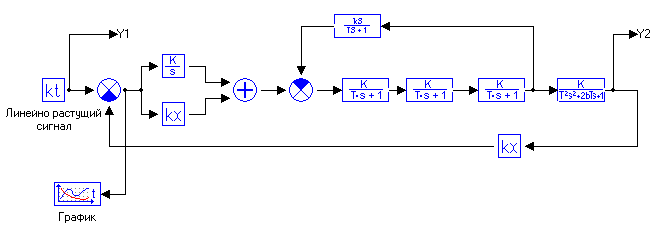 Для определения коэффициента ошибки по скорости с1, к входу САР нужно подключить генератор линейно растущего сигнала:
Для определения коэффициента ошибки по скорости с1, к входу САР нужно подключить генератор линейно растущего сигнала: