Исследование динамики АСР. Построение диаграмм качества
Принято для расчета переходных процессов АСР технологических объектов (химических, металлургических, а также предприятий строй индустрии) применять метод расчета переходных процессов по возмущению со стороны регулирующего органа. Задание регулятору определяется как правило по показателям качества конечного продукта (или полупродукта), поэтому задание регулятора не меняют, а процесс регулируют посредством воздействия на регулирующий орган, через который, как правило, идут основные возмущения. Качество переходных процессов АCР оценивают при нанесении единичного ступенчатого возмущения и при нулевых начальных условиях. Для исследования динамики АСР давления пара и для оценки влияния параметров настройки системы необходимо рассмотреть математическую модель используя при этом уравнение вынужденного движения данной системы и варьируя параметрами k р и T и. Оценка качества полученных при этом переходных процессов позволяет дать количественную оценку влияния каждого из параметров настройки на показатели качества переходных процессов. Следующие требования, предъявляемые к качеству переходных процессов: – минимальное время переходного процесса; – динамическая ошибка, не должна превышать 4 %.
Рис. 3.2.1. Функциональная схема АСР давления пара
Рис. 3.2.2. Структурная схема АСР давления пара
Исследуем влияние параметров настройки регулятора на переходные процессы в АСР:
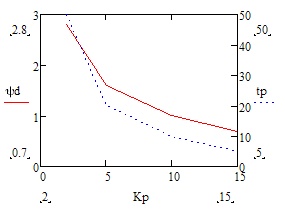
Рис. 3.2.3. Переходные процессы АСР давления пара при различных k р При значении К п=2, получим следующие показатели: – время переходного процесса составило τп = 50 c; – динамическая ошибка ψдин=2,8 %;
При К п=5, имеем: – время переходного процесса составило τп = 20 c; – динамическая ошибка ψдин=1,6 %;
При значении К п=10, получим показатели: – время переходного процесса составило τп = 10 c; – динамическая ошибка ψдин=1 %;
При значении К п=15, получим показатели: – время переходного процесса составило τп = 5 c; – динамическая ошибка ψдин=0.7 %;
Рис. 3.2.4 Переходные процессы АСР давления пара при различных T и При значении T и =0.5 с, получим следующие показатели: – время переходного процесса составило τп = 5 c; – динамическая ошибка ψдин=0,9%; При T и =1 с, имеем: – время переходного процесса составило τп = 4,5 c; – динамическая ошибка ψдин=0,7 %; При значении T и =2 с, получим показатели: – время переходного процесса составило τп = 2,5 c; – динамическая ошибка ψдин=0,6 %. При значении T и =3 с, получим показатели: – время переходного процесса составило τп = 2 c; – динамическая ошибка ψдин=0,54 %;
Построим графики зависимости показателей качества переходного процесса от параметров настройки регулятора.
Рис. 3.2.5. Графики зависимости показателей качества от параметров настройки регулятора
|