
Электрический исполнительный механизм
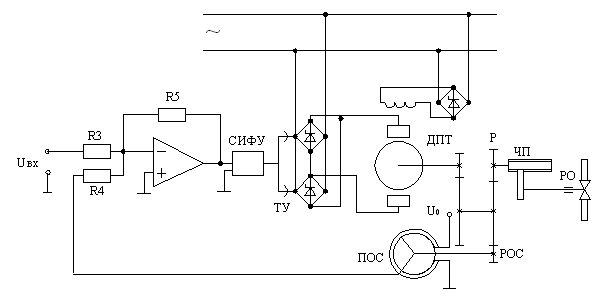
В качестве альтернативы шагового двигателя, изображенного на принципиальной схеме также используются исполнительные двигатели с независимым возбуждением, которые имеют две обмотки: обмотку возбуждения, подключаемую к сети с постоянным напряжением U в=const, и обмотку управления, на которую подаётся напряжение управления U у= var. Для исполнительных двигателей применяют якорное или полюсное управление. При якорном управлении напряжение управления подаётся к обмотке якоря (Я), которая является обмоткой управления, а напряжение возбуждения – к обмотке полюсов, которая является обмоткой возбуждения. При полюсном управлении напряжение управления подаётся на обмотку полюсов, которая является обмоткой управления, а напряжение возбуждения через добавочный резистор на обмотку якоря, которая является обмоткой возбуждения. Исполнительным двигателям постоянного тока присущи следующие достоинства: – широкий диапазон регулирования частоты вращения; – линейность механических и регулировочных характеристик; – отсутствие самохода; – значительный пусковой момент; – малые масса и габариты. Рассмотрим электрический исполнительный механизм с двигателем постоянного тока, рис. 2.2.1. Управление двигателем осуществляется от тиристорного усилителя мощности, содержащего два встречно включенных тиристорно-диодных моста и схемы импульсно-фазового управления. Для снижения частоты вращения вала ИМ и увеличения рабочего момента используется понижающий редуктор и червячная передача. ЧП преобразует вращательное движение ротора ДПТ и Р в поступательное перемещение регулирующего органа. Запишем передаточную функцию ИМ:
Рис. 2.2.1 Принципиальная схема исполнительного электрического механизма с двигателем постоянного тока
Расчет данных: ДПТ: ТУ: Р: ЧП: РОС: ПОС: ОУ: Получаем: Подставим рассчитанные параметры в уравнение:
Таким образом двигатель постоянного тока с потенциометром обратной связи можно также описать как апериодическое звено первого порядка.
|
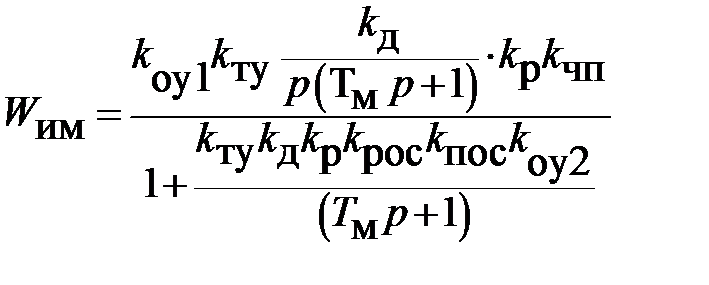 ,
,  ,
,
 – звено первого порядка.
– звено первого порядка. Вт;
Вт;  В;
В;  об/мин
об/мин  об/с;
об/с;  рад/с;
рад/с;  А;
А;  н×м;
н×м;  н× м/А;
н× м/А;  рад/с×В;
рад/с×В;  об/с×В.
об/с×В. В;
В;  В;
В; 
 об/с;
об/с;  об/с;
об/с;  .
. об;
об;  о.е.;
о.е.;  о.е./об.
о.е./об. об;
об;  об;
об;  .
. В;
В;  об;
об;  В/об.
В/об. ;
; 
 ;
;  с.
с.



