
Решение задачи традиционными методами. Построение математической модели
Построение математической модели. Суммарные затраты, связанные с распределением объемов финансирования Хij из каждого i-ro источника в каждом j-ом периоде, можно записать в таком виде: m n
Совокупность систем линейных ограничений (см.выше), граничных условий (3.3.1.1) и линейной целевой функции (3.3.1.2) образует математическую модель задачи, которую часто называют транспортной. Рассмотрим один из эффективных алгоритмов решения транспортной задачи метод потенциалов. В качестве начального допустимого решения опорного плана возьмем план, приведенный в табл. 3.3.1.2. Основой вычислительного процесса (алгоритма) этого метода является определение критерия оптимальности вида:
где Cij – фактические затраты, связанные с выделением единицы денежных ресурсов из i-ro источника в j-ом периоде, Zij - расчетные затраты, связанные с выделением единицы денежных ресурсов из i-ro источника в j-ом периоде. Расчетные затраты Zij определяются только для клеток, куда финансовые ресурсы не распределены. Если все dij > 0 (i = l, 2,..., m), (j = 1, 2,..., n), то полученное допустимое решение (опорный план) является оптимальным, если нет, то с помощью этого критерия оптимизации можно указать способ улучшения решения.
Таблица 3.3.1.2
Алгоритм решения. Алгоритм решения включает следующие основные этапы: 1. Составление и решение системы уравнений. Вводятся условные цены-оценки единицы ресурса для каждого поставщика Ui (i = 1, 2,..., m) и каждого потребителя V (j = 1, 2,..., n). Эти оценки или, как их чаще называют, потенциалы выступают в задаче как локальные цены (или наценки к единой цене), создающие заинтересованность в правильном распределении ресурсов. Так, цена в пункте потребления Vj равна цене в пункте поставщика Uj плюс наценка Сij. В нашей задаче наценка Сij представляет собой дополнительные затраты на выделение единицы ресурса из i-ro источника в j-ом периоде. Таким образом:
VJ = U1 + C1J. С целью нахождения значений Vj (j = 1, 2,..., n) и Ui (i = 1, 2,..., m) составляются уравнения для клеток, в которые распределены ресурсы в опорном плане: V3 – U1 = C13 = 24 V2 – U2 = C22 = 18 V1 – U3 = C31 = 19 V2 – U3 = C32 = 10 V1 – U4 = C41 = 3 V3 - U3 = C33 = 100; V4 - U4 = C44 = 8. Мы имеем 7 уравнений и 8 неизвестных, поэтому одной из искомых переменных наиболее часто встречающейся в уравнениях, для облегчения счета необходимо присвоить произвольное значение равное нулю. В нашей системе уравнений чаще всех встречается переменная U3. Предположим, U3 = 0. Последовательно решая соответствующие уравнения, получим: V, = 19, V2 = 10, V3 = 100, U, = 76, U2 = - 8, U4 = 16, V4 = 24. 2. Определение расчетных значений Zij. Zij = Vj - Ui При этом используются те индексы i и j, на пересечении которых в соответствующих клетках ресурсы не распределены; Z11 = V1 – U1 = 19 - 76 = -57; Z12 = V2 – U1 = 10 - 76 = -66; Z14 = V4 – U1 = 24 – 76 = -52; Z21 = V1 - U2 = 19 + 8 = 27; Z23 = V3 - U2 =100 + 8 = 108; Z24 = V4 - U2 = 24 + 8 = 32; Z34 = V4 - U3 = 24 + 0 = 24; Z42 = V2 - U4 = 10 - 16 = -6; Z43 = V3 - U4 = 100 - 16 = 84.
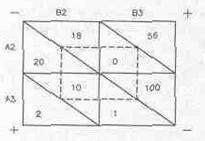
3. Определение значений dt и проверка условия оптимальности. Если все d > 0 (i = 1, 2,..., m), (j = 1, 2,..., п), то полученное допустимое решение (опорный план) является оптимальным, если нет, то переходят к новому: d11 = C11 – Z11 = 70 + 57 = 127; d12 = C12 - Z12 = 38 + 66 = 104; d14 – С14 – Z14 = 92 + 52 = 144; d21 = C21 - Z21 = 58 - 27 = 31; d23 = C23 - Z23 = 56-108 = -52; d24 = C24 - Z24 = 72 - 32 = 40; d34 = C34 - Z34 = 30 - 24 = 6; d42 = C42 - Z42 = 36 + 6 = 42; d43 = C43 - Z43 = 121 - 84 = 37. В нашей задаче не все d23 > 0, а это означает, что решение еще неоптимально, и мы переходим к определению нового опорного плана. 4. Определение нового опорного плана с меньшим значением целевой функции. Для этого в решение вводится та переменная Xij, которой отвечает наименьшее отрицательное значение dij. Вводя ее, одновременно изменяют величины других переменных, по меньшей мере в трех заполненных клетках, чтобы не нарушались итоговые величины в строках и столбцах таблицы - a., b. Для этого строят многоугольник, одна из вершин которого находится в свободной клетке, а остальные - в заполненных ресурсами (загруженных). Для этой вершины dij < 0 и имеет наименьшее значение. При этом все углы многоугольника должны быть прямыми. Перемещение ресурсов производят в пределах клеток, лежащих в вершинах многоугольника (рис. 3.3.1.1). Если для свободной клетки поставить знак + (плюс), а в следующей вершине - (минус), затем снова + и т.д., поочередно изменяя знак, то в нее переносится меньшее из чисел, стоящих в клетках с отрицательными знаками. В результате она, как основная переменная, исключается из опорного плана. Одновременно необходимо установить равновесие по всему многоугольнику. Если использовать правило перераспределения ресурсов в пределах многоугольника, распределение будет выглядеть, как на рис. 3.3.1.2.
Рис. 3.3.1.1 Схема перераспределения ресурсов.
Рис. 3.3.1.2. Схема перераспределенных ресурсов. При этом сумма ресурсов по всем строкам и столбцам осталась без изменений. Проводя соответствующие преобразования в исходном допустимом решении (плане), получим новый опорный план (табл. 3.3.1.3). В результате построения нового допустимого решения (начального плана) способом потенциалов величина критерия оптимизации (целевой функции) будет равна: Y = 14 х 24 + 19 х 18 + 1 х 56 + 23 X 19 + 3 X 10 + 7 х 3 + 34 х 8 = 1494. Нахождением нового опорного плана заканчивается первое приближение (итерация). Далее все этапы повторяются.
Таблица 3.3.1.3
|
 . (3.3.1.2)
. (3.3.1.2)

 A1
A1
 0 70
0 70
 0 38
0 38
 0 24
0 24
 A2
A2
 0 58
0 58

 23 19
23 19
 2 10
2 10
 A4
A4

 A3
A3



