Колонка ручного тормоза
Рис.1 Рама кузова
Рис.2 Пол вагона
Рис.3
Рис.4 Дверное подвешивание (шариковое)
Рис.6 Механизм блокировки
\
Рис.7 Поводковая и шпинтонная рамы
Рис.8 Ось колёсной пары
Рис.9 Подрезиненное колесо
Редуктор состоит:
1. Корпус редуктора 3 2. Большое зубчатое колесо 13 3. Малая шестерня 1 4. Подшипники малой шестерни 2, 6 5. Осевые подшипники 8, 12, 14 6. Крышки редуктора 7, 15 7. Крышки малой шестерни 4, 5 8. Лабиринтные кольца раздельной смазки 18, 19 9. Лабиринтные запорные кольца 10, 9, 16, 20
Рис.10 Редукторный узел
Рис.11 Буксовый узел
Рис.12 Подеска редуктора
Рис.13 Комплексное предохранение
Рис.14 Подвешивание тягового двигателя
Рис.15 Карданная муфта
Рис.16 Поводковое буксовое подвешивание
Рис.17 Центральное подвешивание
Пятник Подпятник
Рис.19
Рис.20 Рычажно-тормозная передача
Колонка ручного тормоза
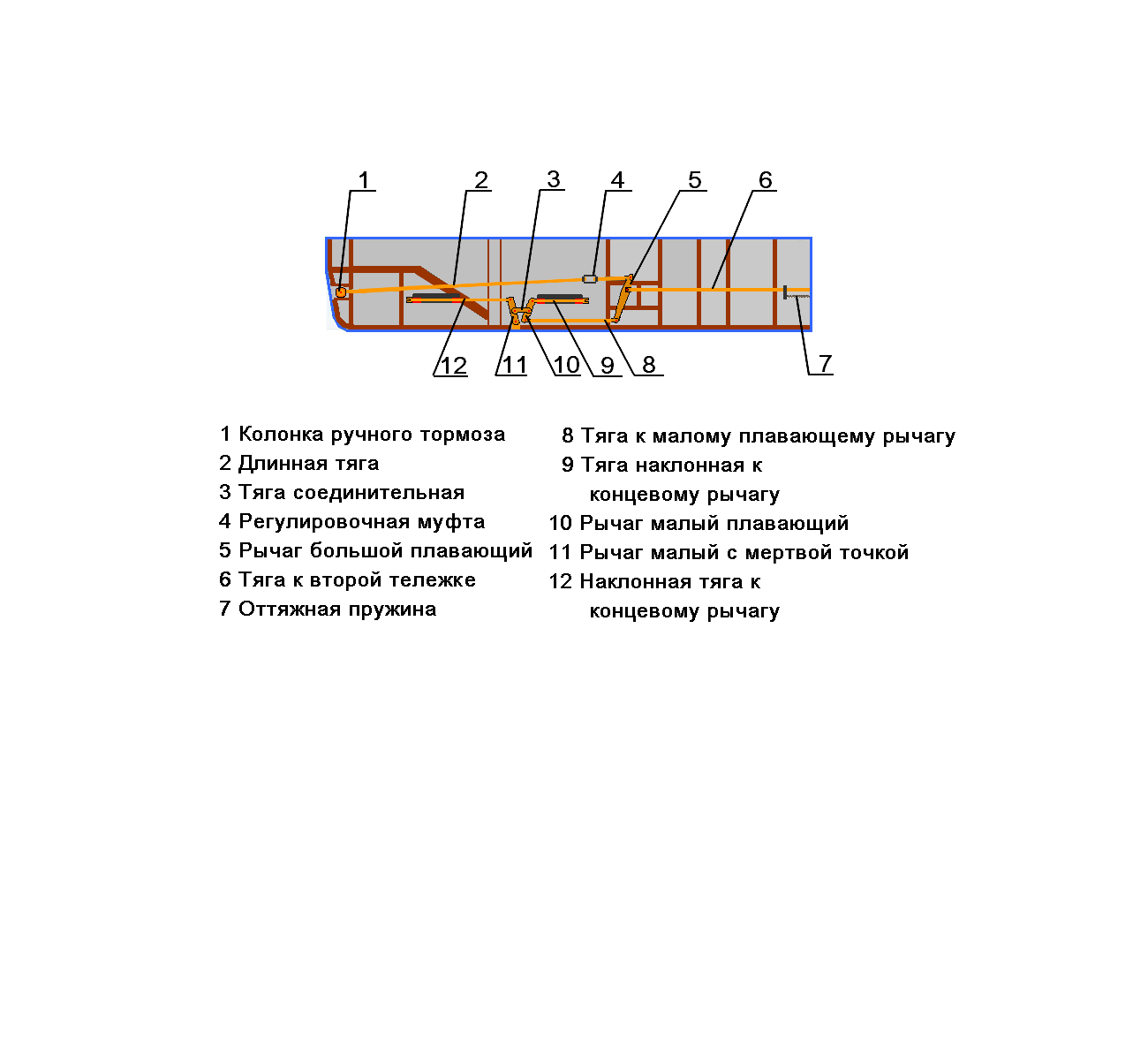
Рис.21 Ручной тормоз
1. Головка со сцепным механизмом 2. ЭКК 3. Стяжной хомут 4.Хомут УТА 5. Дополнительная шайба 6. Радиант (балка подвески) 7. Стакан с пружиной 8. Деревянный скользун 9. Предохранительная скоба 10.Водило 11. Горизонтальный валик 12. Серьга 13. Вертикальный валик 14. Гнездо крепления автосцепки 15. Хребтовые балки 16. Задняя направляющая втулка 17. Задняя пружина 18. Промежуточная шайба 19. Передняя пружина 20. Передняя направляющая втулка 21. Направляющая втулка водило 22. Корончатая гайка водило 23.Серьга автосцепки
Рис.22 Комбинированная автосцепка
Рис.23 Головка автосцепки
|


















 Рис.18 Гидравлический гаситель колебаний
Рис.18 Гидравлический гаситель колебаний