
Пенроуз Р. 7 страница
Вогнутые поверхности будут отражать перевернутые изображения. Таким образом, в верхней части фар отразиться опорная поверхность, в нижней - близко расположенные предметы и фон. Боковые цилиндрические поверхности в нижней части кузова отразят опорную поверхность и будут подсвечены (высветлены) рефлексным, отраженным светом. (Рис.33)
Остекленные поверхности, кроме перечисленных выше основных принципов отражения зеркальными поверхностями, будут частично пропускать и изображение находящихся за ними объектов (интерьер или фон). При этом если на стекле отражается темный фон, то детали интерьера изображаются более светлым тоном того же цвета и наоборот, - при отражении в этой зоне стекла светлого фона интерьер показывается более темным фоном. (Рис.34)
Основные поверхности (кузов, стекла, зеркала, диски колес) кроме того, могут отражать и точечные источники света в виде бликов, которые наносятся в последнюю очередь. Как правило, блики наносят в местах резкого перелома поверхностей (углы кузова), на стеклах в зоне границы отражения горизонта. На дисках колес блики располагаются на диагонали, направленной в сторону источника света. (Рис.35)
5.1 Художественные материалы.
Поисковые эскизы выполняются в «быстрой» технике, - бумага, карандаш. Может использоваться цветной карандаш или пастель, белила. Эскизы выполняются как на белой, так и на цветной бумаге. Более детальные эскизы создаются с помощью маркеров, детали и основные линии, силуэт прорабатываются с помощью рапидографов различной толщины (от 0, 25 до 0, 6 мм). В случае использования пастели или других «рыхлых» материалов, рапидограф используется до применения пастели, иначе произойдет засорение рабочего клапана рапидографа. Напомним (сказанное в пункте 3.2), что в данном случае рассмотрены примеры использования художественных материалов и вспомогательных инструментов для построения демонстрационного рисунка от руки, но также необходимо понимать, что компьютерный рисунок не является исключением, в основе используя аналогичные материалы и инструментарий. Отличие компьютерного рисунка в том, что он требует дополнительных знаний программного обеспечения. Большие демонстрационные рисунки, в т.ч. и в масштабе 1: 1 выполняются на матовой полупрозрачной пленке. Основные поверхности закрываются цветом с помощью губки (поролона) и порошка пастели (цвета могут смешиваться) и растворителя. При этом смежные области различных цветов рисунка защищены шаблоном. Зоны плавного перетекания цвета получаются с применением аэрографа. Контуры, линии и тени выполняют с помощью самоклеющейся ленты различной ширины. Для получения полутонов используется оборотная сторона пленки. Таким образом, рисунок получается двусторонним. Следует отметить, что не существует какой - либо предпочтительной техники рисунка и выбора материала. Практически таких же результатов можно добиться с помощью компьютера, используя соответствующие инструменты, предлагаемые той или иной программой. Преимущества компьютера – чистая одежда исполнителя и возможность изменения масштабов, вариантов цветовых решений, 3D – восприятие объекта. Каждый исполнитель выбирает ту технику, какой он лучше владеет, поскольку рисунок не является самоцелью (если это не работа иллюстратора), - это всего лишь этап в цепочке рабочего проекта автомобиля, главное в которой - наличие яркой, самобытной идеи, опирающейся на передовые технологии и отвечающей запросам конкретной группы потребителей.
5.2 Композиционные особенности построения формы автомобиля.
Проектирование формы автомобиля обладает некоторыми характерными особенностями, принципиально отличающими этот процесс от проектирования других объектов промышленного дизайна. 5.2.1 Кузов легкового автомобиля, автобуса и даже грузового автомобиля следует рассматривать как скульптурное произведение. Поэтому, автомобиль должен быть гармоничным со всех ракурсов и при любом освещении. Гармония формы предполагает логическое построение всех поверхностей и линий, их естественное перетекание одной в другую или визуально привлекательное сопряжение поверхностей и линий. (Рис.36)
Нежелательно иметь на кузове винтовые поверхности и ломающиеся линии бликов, если нет прямой связи с изначально заложенным стилем. 5.2.2 Необходимо помнить, что на поверхности кузова нет прямых линий кроме линии порога, т.к. любая линия динамичного кузова легкового автомобиля изменяется в трех координатах одновременно. 5.2.3 Следует учитывать, что автомобиль находится в движении и, в известном смысле, символизирует движение. Следовательно, его пропорции и форма должны быть динамичными. В противном случае, автомобиль будет выглядеть скучным и статичным. (Рис.37)
Могут быть и исключения, когда функциональное назначение автомобиля требует выявления иных качеств, например, проходимости или высокой грузоподъемности, что должно находить свое отражение в построении формы. (Рис.38)
5.2.4 Образующие, по которым строится поверхность, должны представлять собой линии переменной кривизны. Исключение - образующие поверхности стекол, которые являются, как правило, частью цилиндра (боковые стекла) или частью конуса (ветровое и заднее стекло легковых автомобилей). Современные технологии позволяют получать стекла и более сложной формы, но использовать эти возможности следует осторожно, памятуя об оптических искажениях. (Рис.39)
5.2.5 Форма кузова на виде сбоку не должна быть близкой к симметричности (принцип «тяни-толкай»). Чем сильнее выявлена асимметричность, тем динамичней, стремительней выглядит автомобиль. (Рис.40)
5.2.6 При проектировании формы кузова следует помнить о пропорциональных соотношениях элементов кузова, его отдельных деталях (фары, задние фонари, бамперы и т.д.) и о функциональных требованиях (удобство входа-выхода, обзорности, требований безопасности и действующих стандартов). Модулем пропорциональных соотношений может служить диаметр колес и размер базы автомобиля (расстояние между передним и задним колесом). 5.2.7 На пропорции автомобиля и его стиль важное влияние оказывают функциональное назначение автомобиля и его компоновка. Функциональное назначение автомобиля определяет оптимальный выбор типа кузова и компоновки (компоновка – взаимное расположение двигателя, важнейших агрегатов, водителя, пассажиров и органов управления).
В заключение стоит отметить, что для успешного изучения рисунка автомобиля необходимо знание основных типов кузовов и принципиальных видов компоновочных решений.
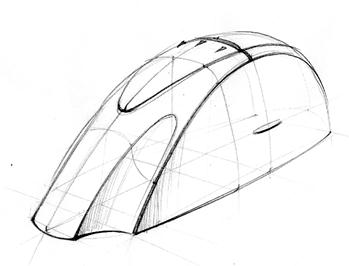
УЧЕБНЫЕ РАБОТЫ 1.3. Построение объема. Простые однообъемные тела: Рис. 41. Компьютерная мышь.
Рис. 42. Рукоятка рычага переключения передач.
Рис. 43. Рукоятка рычага ручного тормоза.
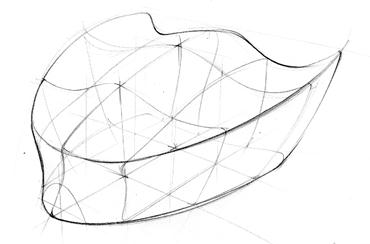
Сложные однообъемные тела: Рис. 44. Рис. А.
Рис. 45. Рис. Б.
Рис. 46. Рис. В.
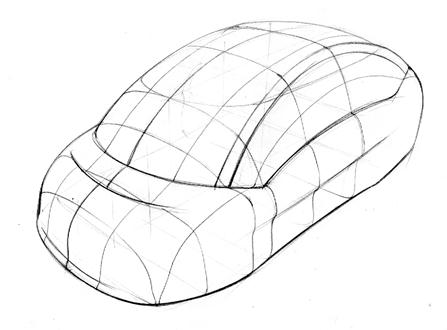
Двухобъемные тела: Рис. 47. Кузов автомобиля малого класса.
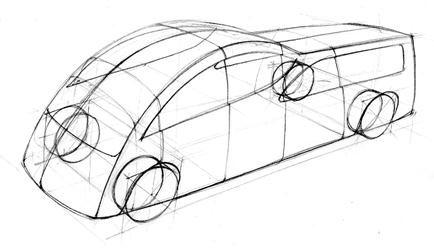
Рис. 48. Корпус многофункционального автомобиля (MPV).
Рис. 49. Тело кузова автомобиля SUV класса.
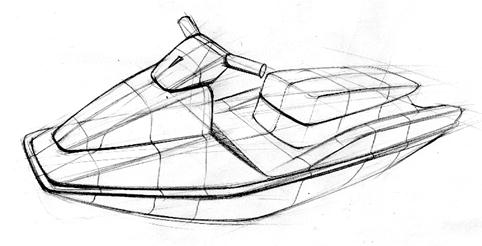
Трехобъемные тела: Рис. 50. Водный скутер.
Рис. 51. Скоростной мотоцикл (трикол).
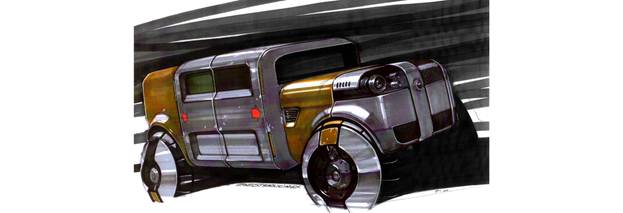
Рис. 52. Капотный магистральный тягач.
1.4. Выявление объема. Передача фактуры.
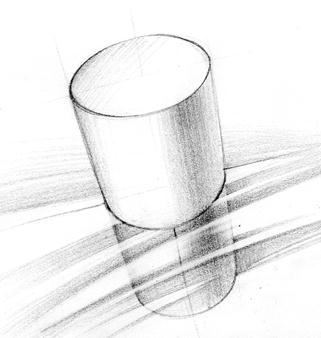
Простые геометрические тела: Рис. 53. Зеркальный шар, Цилиндр, Конус.
Рис. 54. Торовое матовое тело.
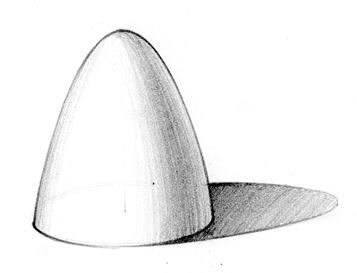
Рис. 55. Пораболическое тело вращения.
Рис. 56. Отражение в опорной зеркальной поверхности.
Сложные тела. Пересечения поверхностей: Рис. 57. Веретенообразное составное тело вертолета.
Рис. 58. Фюзеляж сверхскоростного автомобиля.
Рис. 59. Воздушно-космические системы.
Рис. 60. Многофункциональный автомобиль.
Рис. 61. Легковой автомобиль малого класса.
Рис. 62. Легковой автомобиль с кузовом типа «купе».
1.5. Композиция. Фон. Выбор фона в зависимости от функционального назначения автомобиля. Рис. 63. Городская среда. Рис. 64. Загородный пейзаж. Рис. 65. Индустриальный пейзаж. Шрифт как фон: Рис. 66. Выбор гарнитуры для передачи характера автомобиля.
Абстрактно-декоративный фон: Рис. 67. Динамичный.
Рис. 67. Статичный.
Рис. 68. Архитектурный.
Различные решения опорных поверхностей: Рис. 69. Матовая.
Рис. 69. Зеркальная.
Рис. 70. Различные фактуры (камень, плиты, брусчатка).
В методическом курсе использованы изображения преподавателей и выпускников кафедры «Дизайн» МГТУ «МАМИ», а именно: Витков С.А. Климов М. Костромин А. Ковалев Д. Чирков А. Черданцев Д.А. Нагорный П. Пирязев М.В. Саакян С.Г. Тер-Арутюнян Т. Царукян Э.А.
Методический курс составили: зав. каф. «Дизайн» проф. Сорокин А.Е. доц. каф. «Дизайн» Зайцев И.А. ст. преподаватель каф. «Дизайн» Пирязев М.В.
Данный материал является интеллектуальной собственностью МГТУ «МАМИ» и не предназначен для несанкционированного распространения.
В связи с тем, что городские власти Феодосии и ответственные службы самоустранились от организации и обеспечения жизнедеятельности отстойника, Феодосийское отделение ОНФ берет под контроль данную критическую ситуацию и требует от городского исполнительного комитета и ответственных служб города отчета о сложившейся ситуации. - 09.06.2014 провести оперативное совещание с участием: · представителей городского совета Феодосии · транспортной дирекции · начальника железнодорожной станции " Айвазовская-Товарная" · управления ЖКХ · представителей санэпидемстанции · МЧС.
Пример
n c =3К − Ш = 3·2 − 4 = 2
δ 11 X 1 + δ 12 X 2 + Δ 1 F = 0 δ 21 X 1 + δ 22 X 2 + Δ 2 F = 0
рад/кН·м рад/кН·м
План 1. Загальні відомості про супутникові системи. 2. Склад приймальної апаратури. 3. Технологія виконання робіт. 4. Способи та методи визначення координат за допомогою супутникових систем. 5. Камеральна обробка даних. 6. Програмне забезпечення для обробки GPS-вимірювань.
1. На сучасному етапі в світі експлуатуються дві системи другого покоління супутникових радіонавігаційних систем: · GPS (глобальна система визначення місцеположення), яка розробляється і підтримується США; · ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система - глобальна навігаційна супутникова система), розробка і перші етапи створення якої зроблені в СРСР, і яка тепер підтримується Росією. Довгий час споживачами навігаційної інформації були транспортні засоби (повітряні, наземні та морські). Але розвиток космічної техніки та досягнутий за допомогою таких систем високий рівень точності визначення місцеположення об'єктів призвели до широкого застосування супутникових радіонавігаційних систем при вирішенні майже усього спектра геодезичних задач і координатно-часового забезпечення широкого кола споживачів. В сучасній радіонавігаційній супутниковій системі функціонують три основні підсистеми, або сегменти (рис. 1), а саме: · космічний сегмент, або підсистема космічних апаратів, що складається із штучних супутників Землі; · сегмент управління, або підсистема контролю та управління; · сегмент користувачів, або апаратура користувачів, що включає велику кількість різноманітних приймачів і забезпечує потреби наземних, повітряних, авіаційних та космічних (в межах ближнього космосу) користувачів. В основі систем GPS і ГЛОНАСС лежить концепція незалежної навігації, відповідно до якої обчислення просторово-часових координат виконується в апаратурі користувачів. У рамках цієї концепції обрано позиційний спосіб визначення місцеположення користувачів на основі беззапитних (пасивних) віддалемірних вимірювань по сигналах навігаційних штучних супутників Землі з відомими координатами. Вибір концепції незалежної навігації та використання беззапитних вимірювань забезпечили можливість досягнення необмеженої пропускної спроможності супутникових навігаційних систем.
Рисунок 1 - Навігаційна супутникова система: НС — навігаційний супутник; КОЦ - координаційно-обчислюваний центр; СТВ - станція траєкторних вимірювань; СУ - станція управління
Навігаційний принцип базується на вимірюванні " псевдовіддалей" між користувачем та чотирма супутниками (рис.2).
Рисунок 2 - Принцип визначення місцеположення у супутникових навігаційних системах
Виходячи з відомих координат супутників, можна обчислити координати антени приймача. В принципі достатньо трьох вимірювань віддалей. Але четверте вимірювання необхідне для того, щоб визначити різницю у часі між годинниками супутників та годинником приймача. Ця похибка синхронізації визначається також за псевдовіддалями. Таким чином, навігаційна система буде працювати ефективно, коли структура побудови космічного сегмента забезпечує прийом сигналів не менш як від чотирьох супутників у будь-який момент часу в будь-якій точці земної кулі Супутники системи ГЛОНАСС розташовані у трьох орбітальних площинах, причому на кожній орбіті обертаються 8 супутників (рис.3, а). У системі GPS прийнято 6 орбітальних площин по 4 супутника в кожній (рис.3, б).
а) б)
Рисунок 3 – Космічний сегмент системи ГЛОНАСС (а) і GPS (б)
Супутники обох систем випромінюють сигнали на двох частотах, які вміщують інформацію про координати відповідних супутників. Ця інформація приймається та фіксується спеціальними вимірювальними станціями - приймачами.
2.
Рисунок 4 - Загальний вигляд геодезичного приймача: 1- сенсор; 2 - підставка; З - з'єднувальні кабелі; 4- дисплей; 5 - контролер; 6- клавіатура; 7 - штатив; 8- акумуляторна батарея Геодезичний приймач супутникової системи включає антену (сенсор), блок управління (контролер), акумуляторні батареї, штатив та з'єднувальні кабелі (рис. 4). Сенсор являє собою водонепроникний приймач радіовипромінення масою до 2кг. Він може одночасно відслідковувати сигнали 6-12 супутників на одній або двох частотах. Управління роботою приймача здійснюється за допомогою контролера або ПЕОМ. Контролер побудовано на базі мікропроцесора. Він забезпечує взаємозв'язок між оператором (спостерігачем) і сенсором. Три основні функції контролера полягають в управлінні роботою сенсора, виборі режиму спостережень та реєстрації інформації з супутників. Процесор забезпечує попередню обробку вимірювальної інформації, її реєстрацію, функціонування каналів зв'язку, клавіатури та дисплея контролера. Клавіатура більшості приймачів схожа на клавіатуру ПЕОМ. Результати вимірювань, тобто сигнали з супутників, реєструються на жорстку карту (модуль пам'яті) ємністю від 512Кб до 4 Мб, яка має внутрішнє джерело живлення для забезпечення збереження даних. Дані з модуля пам'яті потім переписуються в ПЕОМ через контролер або спеціальний пристрій. Подальша обробка інформації (обчислення координат) виконується на ПЕОМ за спеціальними програмами, які постачаються разом з приймачами.
3. Існує два способи визначення місцеположення за допомогою супутникових систем: - абсолютний; - відносний (диференційний). При визначені абсолютного положення координати антени приймача отримують в єдиній системі координат, що прийнята в навігаційній системі. У цьому випадку використовують тільки один приймач, який встановлюють на пункті, і впродовж достатнього проміжку часу ведуть відповідні спостереження. Точність визначення абсолютних координат, в основному, визначається похибками, які залежать від роботи пристроїв, що передають сигнали з супутників, стану зовнішнього середовища у зоні розповсюдження радіохвиль, способів обробки сигналу приймачем. Немалий вплив мають похибки координат супутників, а також взаємне розташування супутників і антени приймача в момент проведення спостережень. Тому найкраща точність при абсолютному визначенні, яка досягається при непорушному приймачі і навіть при багатоденних безперервних спостереженнях, складає 3 - 5м. Це, зрозуміло, недостатньо для геодезичних цілей. З цієї причини у геодезичній практиці використовуються виключно відносні (диференційні) способи. При відносних визначеннях спостереження ведуть з застосуванням двох приймачів П1 і П2 на двох об'єктах в співпадаючі моменти часу по одному й тому ж сузір'ю супутників (рис. 5). За результатами цих вимірів визначають проекції на осі геоцентричної системи координат базової лінії S, що з'єднує ці два приймача, відстань між ними, а також кути, що характеризують напрямок базової лінії.
Рисунок 5 - Принцип відносних визначень
4. Супутникова приймальна апаратура (супутникові приймачі) призначена для роботи в режимах " Статика", " Швидка статика", " Стою/Іду", " Кінематика" і " Реокупація". При геодезичних роботах, в основному, використають статичні вимірювання (рис. 6). Кінематичні зйомки в режимах " Кінематика" і " Реокупація" використовують для визначення координат (траєкторії) пересувного приймача відносно іншого непорушного. Статичні зйомки (рис. 6, а) передбачають виконання диференційних супутникових спостережень між двома й більш непорушними приймачами, один з яких є базовим. За базову станцію приймається будь-який пункт, координати якого відомі, або пункт із найбільшою тривалістю вимірів. Усі станції, місцеположення яких визначено відносно координат базової станції, називаються пересувними. Будь-яка з пересувних станцій, координати якої отримані з необхідною точністю, може бути використана як базова для подальшого створення мережі. Для мережі, що показана на рис. 6, а, спочатку базовою станцією є пункт І. Відносно нього визначаються положення пунктів II, III, V. Далі, відносно пункту II визначають пункти III, V, потім від пункту III - пункти IV та V, і в кінці відносно пункту IV визначають положення пункту V. Таким чином, постійна базова станція для всієї мережі в цілому не обов'язкова. Статичні зйомки виконують при великих відстанях (сторони понад 10км) при спостереженні чотирьох й більше супутників. Для забезпечення паспортної точності необхідно, як мінімум, одна година спостережень.
|




































 рад рад рад
рад рад рад





















































