
Основы электропривода
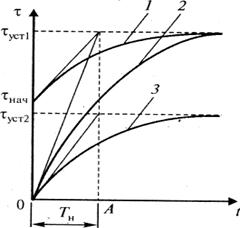
Электроприводом называется электромеханическая система, осуществляющая преобразование электрической энергии в механическую и обеспечивающая электрическое управление механической энергией, предназначенной для приведения в действие исполнительных органов рабочих машин. В современный электрический привод входят следующие основные устройства: - преобразовательное устройство питания, подводящее электро-энергию требуемых параметров; - электрический двигатель, преобразовывающий подводимую - передаточное устройство, осуществляющее передачу механической мощности от электродвигателя к исполнительному механизму; - устройство управления и регулирования электрической и механической мощностями; - устройство автоматизации. Различают одиночный и многодвигательный электропривод. В одиночном электроприводе один электродвигатель приводит в движение, как отдельные механизмы, так и исполнительный орган одной рабочей машины. Примером такого электропривода могут служить простые металлорежущие станки, большая номенклатура ручного электроинструмента. В многодвигательном электроприводе каждый отдельный механизм и исполнительный орган рабочей машины приводятся в действие своими электродвигателями. Примером такого электропривода может служить мостовой кран, у которого все три механизма: мост, тележка и подъемное устройство, приводятся в действие отдельными электродвигателями. При многодвигательном электроприводе создаются более благоприятные условия для автоматизации отдельных механизмов, исполнительного органа и рабочих процессов в целом, вследствие чего, эти электроприводы получают все большее распространение. Применение управляющих ЭВМ и встроенных микропроцессорных систем существенно повышает качество электроприводов для создания современных технических средств автоматизации технологических процессов, например, на основе роботов и манипуляторов. Как было отмечено ранее, одним из основных устройств электропривода является электродвигатель. Применение электродвигателей для привода в движение исполнительных органов рабочих машин обусловлено рядом их преимуществ перед другими двигателями. К этим преимуществам следует отнести возможность изготовления электродвигателей практически любой мощности, простоту управления и регулирования, надежность эксплуатации, возможность автоматизации. Поэтому правильный выбор электрического двигателя для определенной рабочей машины является ответственной и важной инженерной задачей. Ниже будут рассмотрены только некоторые, наиболее важные аспекты решения этой задачи. Мощность выбираемого электрического двигателя для работы в электрическом приводе определяется, в конечном счете, допустимой температурой нагрева его изоляции. Соблюдение установленных ограничений по допустимой температуре нагрева обеспечивает нормативный срок службы двигателя в пределах 15-20 лет. В современных двигателях применяются несколько классов изоляции, допустимая температура нагрева которых составляет: для класса А - до 105°С, Е - до 120°С, В - до 130°С, F - до 155°С, Н - до 180°С, С - свыше 180°С. Превышение допустимой температуры ведет к преждевременному разрушению изоляции и существенному сокращению срока службы электродвигателей. Поэтому в первую очередь необходимо рассмотреть и выяснить законы нагрева и охлаждения электродвигателей. В работающем электродвигателе происходят потери энергии, которые вызывают нагрев машины. Мощность этих потерь Δ Р тем больше, чем большую мощность развивает двигатель на валу Р2 и чем ниже его КПД η: Δ Р = Р2(1/η -1). (9.1) В связи с трудностью проведения точного анализа при исследовании тепловых процессов в двигателях, обычно принимаются следующие допущения: двигатель рассматривается, как однородное тело, имеющее бесконечно большую теплопроводность и одинаковую температуру во всех своих точках; теплоемкость двигателя и его коэффициент теплоотдачи не зависят от температуры двигателя. Поскольку температура двигателя зависит не только от его нагрузки, но и от температуры окружающей среды, то при расчетах учитывают разность этих температур и называют это превышением температуры τ. Для принятых допущений уравнение теплового баланса электродвигателя при постоянной нагрузке имеет вид: Δ Рdt = Сdτ + Aτ dt, (9.2) где Δ Р – мощность потерь в двигателе, принятая постоянной на любом интервале времени dt; С – теплоемкость двигателя; А – теплоотдача двигателя. При длительной работе двигателя за время t = ∞ наступает тепловое равновесие, и повышение его температуры прекращается (dτ = 0). Установившаяся температура перегрева приобретает следующее значение τ УСТ = Δ Р/А. (9.3) Каждой нагрузке и, следовательно, каждой величине мощности потерь двигателя будет соответствовать своя установившаяся температура перегрева. Очевидно, двигатель можно нагружать только такой мощностью, при которой установившийся перегрев ее изоляции не превышает максимально допустимого значения. Эту мощность и называют номинальной. Из выражения (9.3) видно, что чем выше теплоотдача двигателя А, тем ниже установившаяся температура перегрева машины. Для увеличения теплоотдачи двигателей их снабжают вентиляторами и, за счет ребристости корпуса, увеличивают их охлаждающую поверхность. Разделим все члены уравнения (9.2) на величину Adt и, с учетом уравнения (9.3), перепишем его в виде: ТН(dτ /dt) + τ = τ УСТ (9.4) где Тн = С/А – постоянная времени нагревания двигателя. Решение линейного дифференциального уравнения (9.4) дает закон изменения температуры перегрева двигателя во времени: τ = τ УСТ(1-е-t/Tн) + τ НАЧе-t/Tн, (9.5) где τ НАЧ – начальное превышение температуры, с которым двигатель начинает работать. На рис. 9.1 приведены кривые нагрева двигателя для разных τ НАЧ и Δ Р, причем кривые (1) и (2) соответствуют одному и тому же значению Δ Р1, а кривая (3) – меньшему значению Δ Р2. Практически процесс нагрева машины можно считать установившимся при прошествии времени τ УСТ ≈ (3÷ 4)ТН (9.6) Процесс снижения температуры перегрева двигателя при его охлаждении происходит также по экспоненте τ = τ НАЧе-t/Tо , (9.7) где τ НАЧ - превышение температуры в начале охлаждения; Т0 = С/А – постоянная времени охлаждения. Снижение температуры перегрева двигателя (рис. 9.2) показано кривой (1) при уменьшении нагрузки и кривыми (2) и (3) при отключении двигателя от сети при различных τ НАЧ.
Рис. 9.1. Кривые нагрева Рис. 9.2. Кривые охлаждения двигателя двигателя
При рассмотрении законов нагревания и охлаждения электродвигателей предполагалось, что нагрузка двигателя продолжительное время остается неизменной, поэтому неизменной является установившаяся температура перегрева τ УСТ. В действительности, нагрузка двигателя при его работе, в зависимости от технологических требований, может меняться по значению различным образом. Кроме того, двигатель может периодически отключаться на некоторое время. Для учета разнообразных условий работы электродвигателя и правильного определения его мощности, рассчитывают и строят нагрузочные диаграммы, которые представляют собой зависимость мощности двигателя, его тока или вращающего момента от времени. По виду нагрузочной диаграммы определяют режим работы двигателя. Режимы стандартизованы. Различают три основных номинальных режима: продолжительный (S), кратковременный (S2) и повторно-кратковременный (S3). Для каждого из этих режимов условия нагрева и охлаждения различны. Продолжительным режимом называют такой режим, в котором температура перегрева двигателя достигает установившегося значения. Различают продолжительный режим с постоянной и переменной нагрузкой. Графики изменения мощности на валу Р2, момента М, потерь мощности Δ Р и перегрева τ, для продолжительного режима с постоянной нагрузкой, приведены на рис. 9.3. На рис. 9.4 приведены нагрузочные диаграммы двигателя, работающего с продолжительной переменной нагрузкой. Признаком режима S1 является выполнение условия tP > Tн, где tP – время работы (включения) двигателя.
Рис. 9.3. Графики, характеризующие продолжительный режим работы двигателя с неизменной нагрузкой
Рис. 9.4. Графики, характеризующие продолжительный режим работы двигателя с переменной циклической нагрузкой Кратковременный режим характеризуется ограниченным временем работы электродвигателя с неизменной нагрузкой, за период которого превышение температуры не достигает установившегося значения. Паузы в работе настолько велики, что двигатель успевает полностью охладиться. Стандартные значения времени работы двигателя с номинальной мощностью составляют 10, 30, 60 и 90 мин. Графики, характеризующие кратковременный режим работы, показаны на рис. 9.5. Повторно-кратковременный режим характеризуется кратковременными периодами работы с неизменной нагрузкой, которые чередуются с кратковременными периодами отключения двигателя (паузами). Причем, как периоды работы, так и периоды пауз не настолько длительны, чтобы превышения температуры могли достигнуть установившихся значений. Этому режиму соответствуют условия tP < 3Тн и t0 < 3Т0. Графики нагрузки и превышения температуры этого режима приведены на рис. 9.6. Для этого режима существенную роль при выборе мощности двигателя имеет значение относительной продолжительности включения двигателя ПВ %: ПВ % = (tP/ tЦ) 100 = [tp/ (tp+ t0)] 100, (9.9) где tp- время работы двигателя; t0 - продолжительность паузы; tЦ -продолжительность цикла.
Р
Рис. 9.5. Графики, характеризующие Рис.9.6.Графики повторно- кратковременный режим работы кратковременного режима электродвигателя работы электродвигателя Продолжительность цикла режима S3 не должна превышать 10 мин. Для повторно-кратковременного режима выпускаются специальные серии двигателей с указанием стандартизованных значений ПВ % - 15, 25, 40 и 60%. Для правильного выбора электродвигателя необходимо знать кинематику электропривода и эксплуатационные условия рабочей машины. Работа системы «электропривод – рабочая машина» связана с действием различных сил и моментов. В механическом движении участвует подвижная часть электродвигателя (ротор или якорь), а также элементы механического передаточного устройства и исполнительный орган рабочей машины. Совокупность этих элементов называют кинематической схемой или механической частью электропривода. Элементы механической части связаны между собой и оказывают тем самым друг на друга соответствующее воздействие. Поэтому, анализируя механическое движение того или иного элемента, необходимо учитывать влияние на него других элементов кинематической схемы. Это достигается соответствующим пересчетом входящих в уравнение движения электропривода сил, моментов, масс и моментов инерции к элементу, движение которого рассматривается. Такой расчет в теории электропривода получил название операции приведения, а сами пересчитанные переменные или параметры – приведенными. Обычно в качестве элемента, движение которого подлежит рассмотрению, в электроприводе принимают двигатель. Поскольку источником механического движения в рассматриваемой системе является электродвигатель, то развиваемый момент на его валу Мдв и является моментом, приводящим всю систему в движение. Если двигатель, приводящий в движение какой-либо исполнительный орган рабочей машины, вращается с постоянной скоростью ω, то вращающий момент двигателя Мдв преодолевает моменты сопротивления статической Мс и динамической Мд нагрузки. Эти все моменты, как было отмечено выше, должны приводиться к вращающемуся валу двигателя. Статический момент сопротивления на валу двигателя Мс обусловливается сопротивлениями сил трения, веса и нагрузкой исполнительного органа рабочей машины и т. п. Динамический момент Мд возникает в системе вследствие изменения скорости движения тех или иных инерционных масс. В соответствии с этим основным уравнением, описывающим движение электропривода, является уравнение моментов, действующих на валу двигателя: Mдв = Мс + Мд = Мс + J(dω /dt), (9.10) где J = ∑ mkR2k – приведенный момент инерции вращающихся частей; mk – масса отдельной k-й части системы; Rk – расстояние соответствующей k-й части системы от оси вращения вала двигателя.
Момент Mдв и механическая мощность Pдв, развиваемая электродвигателем, связаны между собой известной зависимостью: Р дв = М дв ω. Если вместо угловой скорости ω [рад/с] воспользоваться частотой вращения n [об/мин], то выражение (9.11) примет вид: Р дв = M дв nн /9550 (9.12) Нормальная безаварийная работа двигателя возможна только тогда, когда его действительный режим не превышает условий номинального режима, для работы в котором электродвигатель построен на заводе. Номинальный режим характеризуется определенной мощностью, напряжением, током, частотой вращения и рядом других параметров. Эти величины называются номинальными и указываются в специальных каталогах или паспорте электродвигателя. Номинальный момент двигателя обычно в паспорте не указывают. Его вычисляют по номинальной мощности Р ном и номинальной частоте вращения nном двигателя: Выбор мощности двигателя для привода с продолжительным режимом работы. При работе с постоянной нагрузкой мощность двигателя подбирается по мощности рабочей машины. Необходимо лишь проверить, достаточен ли пусковой момент двигателя для пусковых условий данной машины. Мощность продолжительного режима работы с постоянной нагрузкой ряда хорошо известных машин определяется на основании проверенных практикой теоретических расчетов или формул. По рассчитанной мощности Ррас в каталогах выбирают двигатель с номинальной мощностью Рдв ном > Ррас. Если режим работы продолжительный, но с переменной нагрузкой, тогда мощность двигателя рассчитывается по методу эквивалентных величин (тока, момента, мощности). Основой этого метода является следующее положение. Поскольку мощность переменных потерь в двигателе пропорциональна квадрату его рабочего тока, то изменяющийся по величине ток нагрузки можно заменить эквивалентным неизменным током I эк, который выделяет в двигателе ту же теплоту. Тогда по нагрузочной диаграмме рабочего тока можно определить эквивалентный ток: Iэк= Зная эквивалентный ток Iэк, номинальное напряжение и номинальный коэффициент мощности, можно определить номинальную мощность двигателя: Pдв.ном ≥ Uном IэкCosφ ном (9.14) Выбранный двигатель проверяется также по току. При этом должно выполняться следующее условие: Iэк ≤ Iдв. ном. Часто приходится иметь дело с нагрузочными диаграммами моментов или мощностей. Если момент двигателя пропорционален току, то есть М = kl, то формула (9.10) превращается в формулу эквивалентного момента;
Выбор двигателя считается правильным, если номинальный момент предварительно выбранного двигателя удовлетворяет следующему условию: Mном ≥ Mэк (9.16) Если угловая скорость двигателя при изменении нагрузки изменяется незначительно, то можно определить эквивалентную мощность:
Двигатель считается выбранным правильно, если для его номинальной мощности выполняется следующее неравенство: Рдв.ном ≥ Рэк. Выбор мощности двигателя для кратковременного режима работы. В этом режиме двигатель работает под нагрузкой мощностью Р в течение времени tp, а затем отключается на время паузы t0, охлаждается, и температура его успевает достигнуть температуры окружающей среды. Если выбрать двигатель с номинальной мощностью Pдв.ном.= Р, то за время работы tp, он не успеет нагреться до допустимой температуры, то есть двигатель будет не загружен по нагреву или недоиспользован (кривая (2), рис. 9.7). Поэтому следует выбрать двигатель номинальной мощностью, меньшей, чем Р (Pдв.ном.< Р), так, чтобы температура его перегрева через время tp достигла допустимого значения (кривая (1), рис. 9.7). Выбрав, таким образом, двигатель, необходимо проверить его на тепловую перегрузку. Коэффициент тепловой перегрузки α т = ∆ Pк/ ∆ Pном, где ∆ Pк – потери мощности при кратковременной нагрузке и ∆ Pном – потери мощности при длительной нагрузке. Выбор мощности двигателя для повторно-кратковременного режима работы. Этот режим работы характеризуется значением относительной продолжительности включенного состояния двигателя ПВ %. Если окажется, что ПВ % > 60 %, тогда двигатель выбирается, как для режима S1, если ПВ % < 10 % – как для кратковременного режима работы. Если же ПВ % оказывается вне указанных границ, то рассчитывают эквивалентную мощность двигателя Рэк по (9.14). Затем, определяют по нагрузочной диаграмме значение реальной относительной продолжительности включенного состояния ПВР %. Далее, найденную эквивалентную мощность Рэк пересчитывают для ближайшего стандартного значения ПВ % по упрощенной формуле, беря значения относительной продолжительности включенного состояния в относительных единицах:
Рис. 9.7. Графики, поясняющие выбор двигателя для кратковременного режима работы
По каталогу выбирается двигатель с номинальной мощностью Рдв.ном.≥ Р при используемой в расчете ПВ %.
|




 (9.11)
(9.11) . Правильный выбор типа двигателя для электропривода и особенно его номинальной мощности, является важной народнохозяйственной задачей, поскольку существенно определяет первоначальные капитальные затраты и стоимость эксплуатации электропривода. Обычно мощность двигателя выбирается в зависимости от характера нагрузки так, чтобы в процессе работы он не перегревался сверх допустимой температуры и допускал кратковременную перегрузку.
. Правильный выбор типа двигателя для электропривода и особенно его номинальной мощности, является важной народнохозяйственной задачей, поскольку существенно определяет первоначальные капитальные затраты и стоимость эксплуатации электропривода. Обычно мощность двигателя выбирается в зависимости от характера нагрузки так, чтобы в процессе работы он не перегревался сверх допустимой температуры и допускал кратковременную перегрузку. (9.13)
(9.13) Mэк = √ ((M21 t1+ M22 t2+…+ M2N tN)/(t1+t2+t3)) (9.15)
Mэк = √ ((M21 t1+ M22 t2+…+ M2N tN)/(t1+t2+t3)) (9.15) Рэк = Mэкω или Рэк = √ ((Р21t1+ Р22t2+…+ Р2NtN)/(t1+t2+t3)) (9.17)
Рэк = Mэкω или Рэк = √ ((Р21t1+ Р22t2+…+ Р2NtN)/(t1+t2+t3)) (9.17) Р = Рэк√ (ПВр/ПВ) (9.18)
Р = Рэк√ (ПВр/ПВ) (9.18)



