Поляризованные электромагнитные механизмы
В судовых установках поляризованные электромагнитные механизмы могут использоваться в качестве реле в схемах автоматики, управления, и сигнализации.
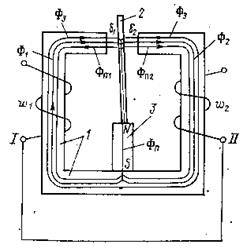
Поляризованные электромагнитные механизмы отличаются от рассмотренных ранее систем наличием в них двух независимых друг от друга источников МДС. Одним источником МДС является постоянный магнит или электромагнит с независимым питанием, создающий поляризующий поток Фп. Другим — рабочие обмотки, МДС которых зависит как от величины, так и от направления тока в схеме, в которую они включены. Наличие поляризующего потока определяет и быстродействие поляризованных механизмов, так как при их срабатывании магнитное поле не создается вновь и не исчезает, а происходит лишь перераспределение магнитного потока. Время срабатывания их значительно меньше, чем нейтральных электромагнитов, так как постоянная времени обмоток обычно мала, ход якоря невелик, а магнитная система выполняется шихтованной. В зависимости от положения якоря в процессе работы поляризованные механизмы бывают двухпозиционные с настройкой с преобладанием или без преобладания и трехпозиционные. У двухпозиционного электромагнита с преобладанием якорь всегда находится в одном положении после исчезновения тока в рабочей обмотке. У двухпозиционного электромагнита без преобладания при отсутствии тока в рабочей обмотке якорь занимает положение около того или другого полюса магнитной системы в зависимости от предыдущего направления тока в этой обмотке. Срабатывание электромагнита произойдет, если изменить направление тока в рабочей обмотке на противоположное тому направлению, какое он имел при предыдущем включении. После отключения якорь останется в том положении, которое он занял при срабатывании. У трехпозиционного электромагнита при отсутствии тока якорь находится в среднем положении. При срабатывании якорь в зависимости от направления тока перемещается в ту или иную сторону. По конструктивной форме магнитопровода поляризованные механизмы выполняются с последовательной, параллельной и мостовой магнитной цепью. Так как магнитная проницаемость магнитотвердых материалов небольшая, то для проведения по ним потока затрачивается значительная часть МДС рабочей обмотки. Кроме того, постоянный магнит подвергается сильному размагничиванию МДС рабочей обмотки. Поэтому чувствительность таких механизмов невелика. Этими недостатками не обладают поляризованные механизмы, у которых поляризующий поток создается специальной обмоткой. Схематическое изображение поляризованного механизма с параллельной магнитной цепью показано на рис. 1.2.7. Поляризующий поток Фп, созданный постоянным магнитом 3, проходя через якорь 2, разветвляется. Одна его часть Фп1 проходит через зазор d1 и левую часть сердечника. Другая его часть Фп2 проходит через зазор d2 в правую часть сердечника. При наличии только этих двух потоков якорь устанавливается в левое или правое положение, так как с уменьшением зазора часть поляризующего потока в нем увеличится за счет уменьшения в другом зазоре. В нейтральном положении, когда d1 = d2, якорь не останавливается. Катушки v1 и v2 располагаются на сердечнике 1 и включаются согласно. Они создают рабочий магнитный поток. Основная его часть Ф3 замыкается через весь воздушный зазор d1 + d2 и сердечник. Меньшие части этого потока Ф1 и Ф2 замыкаются по якорю, воздушному зазору d1 и d2 и части сердечника. При наличии рабочего потока в одном из зазоров будет разность потоков, в другом их сумма. В рассмотренном примере в левом зазоре действует поток Фп1 — Ф3 — Ф1, а в правом зазоре Фп2 + Ф3 + Ф2. По мере увеличения рабочего потока результирующий поток в зазоре d1 будет уменьшаться, а в зазоре d2 —увеличиваться. При определенном соотношении потоков сила, действующая на якорь от суммы потоков, становится больше силы, созданной разностью потоков, и якорь перекинется слева направо, т.е. система сработает. Для возврата системы в исходное положение нужно изменить направление тока в рабочих катушках. Систему можно настроить таким образом, что якорь возвратится в исходное положение при уменьшении рабочего потока и сохранении его полярности. Таким образом, поляризованный механизм с параллельной магнитной цепью не требует пружины для удержания якоря при отсутствии тока в обмотке. Поэтому можно выполнить механизм двухпозиционным двухстороннего действия (нейтральная настройка) или двухпозиционным одностороннего действия (настройка с преобладанием). Применение пружины в таких механизмах позволяет получить трехпозиционное исполнение.
|