
Динамика манипуляционных систем в условиях вибрации
Случайный колебательный процесс с изменяющимися во времени величинами амплитуды и частоты. Возникают при: 1. Неправильно выбранном режиме разгона или торможения 2. Передаче внешних вибраций через фундамент промышленного робота-манипулятора (ПРМ) Вибрации значительно увеличивают динамическую ошибку. Для исследования влияний вибраций примем упрощение, заключающееся в том, что основание системы совершает гармонические колебания с частотой ω.
Определим коэффициент виброизоляции системы:
ω – частота внешнего гармонического воздействия
Очевидно, что для борьбы с вибрациями можно воздействовать на 2 параметра β и Ω0. 1. Виброгашение в системе проявляется только для колебаний в диапазоне частот ω> 2. В диапазоне частот 0< ω < 3. При проектировании виброзащиты системы необходимо стремиться к уменьшению Ω0 и созданию мягкой, упругой системы с малой жесткостью без амортизатора вязкого трения.
|
 Поведение системы будет описываться дифференциальным уравнением:
Поведение системы будет описываться дифференциальным уравнением:
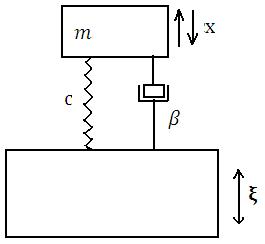 P0 – амплитуда усилия внешнего гармонического воздействия.
P0 – амплитуда усилия внешнего гармонического воздействия.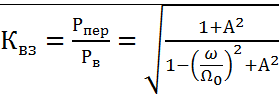
 - амплитуда усилия дин. реакции амортизатора на перемещение основания
- амплитуда усилия дин. реакции амортизатора на перемещение основания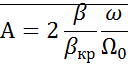
 - собственная частота колебаний
- собственная частота колебаний - коэфф-т критич. затухания.
- коэфф-т критич. затухания.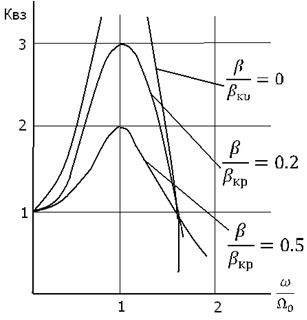 Построить графики зависимости коэффициента виброзащиты от относительной частоты при различных значениях β.
Построить графики зависимости коэффициента виброзащиты от относительной частоты при различных значениях β. Ω0
Ω0


