
Механическая система пр и манипулятора как объекта управления. Особенности динамики
Общие понятия дисциплины. Классификация роботов-манипуляторов Робот – автоматическое устройство с антропоморфным действием, которые частично или полностью заменяют человека при выполнении работ в опасных или вредных условиях при плохой доступности объекта и в др. подобных случаях. Основные особенности: 1. Антропоморфизм; 2. Универсальность; 3. Наличие элементов интеллекта; 4. Наличие памяти; 5. Способность обучаться; 6. Способность ориентироваться в окружающей среде. Робототехника – наука, занимающаяся разработкой автоматизированных механических систем. Манипулятор – сложный механизм, предназначенный для управления положением предметов в пространстве. Робот-манипулятор – комплексное механизированное устройство, предназначенное для замещения человеческих рук в трудовой деятельности. Основные сферы применения ПР: 1. Сварка; 2. Погрузка-разгрузка; 3. Окраска; 4. Работа на линейном производстве.
Автоматические – работают самостоятельно, необходимо лишь задать параметры. Программные – работают по жестко заданной программе. Адаптивные – имеют сенсорные устройства, благодаря чему способны выполнять операции с не полностью определенной или частично изменяющейся обстановкой, адаптируются к ней. Интеллектуальные – благодаря наличию искусственного интеллекта способны распознавать обстановку, воссоздавать модель окружающей среды, самообучаться. Биотехнические – в их работе постоянно участвует оператор, который задает требуемое перемещение. Интерактивные – оператор в работе учувствует лишь частично, периодически задавая определенные параметры с помощью интерфейсного модуля. Механическая система пр и манипулятора как объекта управления. Особенности динамики
1. Редуктор (цилиндрическая, коническая, червяк и т.д.); 2. Ременная передача; 3. Цепная передача. Для преобразования вращательного движения в поступательное применяються: 1. Зубчатое колесо – рейка; 2. Червяк – зубчатая рейка; 3. Винт – гайка. Эти механизмы характеризуются радиусом приведения: Основные требования к приводам ПР и М: 1. Обеспечение заданной точности; 2. Устойчивая работа в широком диапазоне изменения параметром системы; 3. Высокое быстродействие при изменяющейся нагрузке и инерционности; 4. Высокая надежность и долговечность; 5. Высокий В зависимости от вида ИЭ выделяют след виды приводов: 1. Пневмопривод: + Невысокая стоимость: + Конструктивная простота; + Высокая надежность; + Пожаробезопасность; + Экологическая чистота; - Низкое быстродействие; - Малый кпд; - Малое развиваемое усилие; Основное применение – привода схватов ПР. 2. Гидропривод: + Большое развиваемое усилие. + Возможность обеспечения поступательного движения без импольз. ПМ; + Возможность создания следящей системы высокой точности; - Высокий уровень шума; - Невысокий кпд, особенно при использовании нерегулируемых насосов; - Пожароопасность; - Ограниченное расстояние для передачи энергии; - Возможность загрязнения окружающей среды. 3. Электропривод: Уступает в плане инерционности РО, в остальном имеет преимущества по отношению к гидро- и пневмоприводам. ОСОБЕННОСТИ ДИНАМИКИ Как правило приводы РМ работают в режиме постоянных пусков, торможения, реверсов. Причем с достаточно большой частотой. Поэтому в таких системах переходные процессы занимают большую часть времени. Манипулятор представляет собой несколько приводов с достаточно сложной механической частью. Для упрощения расчетов часто пренебрегают связями между звеньями, а каждое отдельное звено рассматривают по отдельности, как одно- или многомассовую систему с упругостями, вязким трением, люфтами.
|

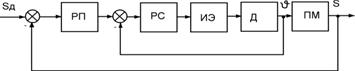 Как правило каждая степень подвижности робота имеет отдельный привод. Общая структура привода РМ имеет вид: ИЭ – источник энергии; Д –двигатель; ПМ –передаточный механизм. Как правило используют следующие виды механических передач:
Как правило каждая степень подвижности робота имеет отдельный привод. Общая структура привода РМ имеет вид: ИЭ – источник энергии; Д –двигатель; ПМ –передаточный механизм. Как правило используют следующие виды механических передач: . В некоторых ПМ радиус приведения является величиной переменной зависящей от угла поворота: кривошипно-шатунные, кулисные.
. В некоторых ПМ радиус приведения является величиной переменной зависящей от угла поворота: кривошипно-шатунные, кулисные. .
.


