Двигатели, используемые в сервоприводах.
На рисунке 4.4 приведена классификация двигателей, используемых в сервоприводах.
Рисунок 4.4 - Классификация двигателей используемых в сервоприводах В лабораторном стенде используются трехфазные синхронные электродвигатели с возбуждением от постоянных магнитов. Их основным достоинством является низкий момент инерции ротора относительно развиваемого крутящего момента. Устройство такого серводвигателя представлено на рисунке 4.5. Частотно-регулируемые синхронные сервоприводы обладают высоким быстродействием, хорошо сочетаются с импульсными системами программного управления и могут использоваться в различных отраслях промышленности, где требуются следующие качества привода: позиционирование рабочих органов с высокой точностью; поддержание крутящего момента с высокой точностью; поддержание скорости перемещения или подачи с высокой точностью.
Рисунок 4.5 - Устройство синхронного серводвигателя: 1 - статор с обмоткой; 2 - разъем для подключений; 3 - датчик скорости и положения; 4 - электромагнитный тормоз; 5 - ротор с магнитами; Достоинства синхронного серводвигателя:высокая надежность, относительно большой момент на валу, возможность динамического торможения при пропадании питания, небольшие габариты и масса, высокий КПД. К недостаткам относитсяиспользование для управления двигателем сервоусилитель переменного тока, который намного сложнее, чем сервоусилитель постоянного тока. 4.3. Описание лабораторного стенда
Рисунок 4.6 - Панель управления сервоприводами На рисунке 4.6 изображена панель управления лабораторного стенда, на нем расположена система управления сервоприводами, которая представлена контроллером FX3U -32M с двумя модулями FX3U-20SSC-H и FX3U-2HSY-ADP. Контроллер FX3u-32M имеет по 16 цифровых выходов и входов. 8 входов вынесены на переднюю панель стенда (X10-X17), входы X0-X6 подключены к выходам сервоусилителей, вход X7 не используется. Подачу сигнала +24B на вход контроллера можно произвести с помощью ключей расположенных на передней панели стенда путем соединения специальным кабелем(он находится у преподавателя) ключа (S0-S7) и одного из входов ПЛК на лицевой панели стенда, либо непосредственно от сервоусилителей или от цифровых выходов самого контроллера, вынесенных на переднюю панель стенда (Y0-Y17), также специальным кабелем. К контроллеру подключены 2 модуля: модуль позиционирования по двум осям FX3U-20SSC-H и высокоскоростной выходной адаптер FX3U-2HSY-ADP. Модуль FX3U-20SSC-H позволяет реализовать в ПЛК серии FX3U высокопроизводительное управление позиционированием исполнительного органа. Он предназначен для использования 10 Мбит/с оптоволоконной сетью связи SSCNETIII. Сервоусилители MR-J3-В можно разместить на расстоянии до 50 метров от ПЛК, используя специальные оптоволоконные кабели. Модуль может выполнять значительное количество операций и обладает возможностями линейной и круговой интерполяции. Он присоединяется к правой расширительной шине. Модуль FX3U-2HSY-ADP подключается с левой стороны FX3U и расширяет существующие возможности высокоскоростного импульсного выхода транзисторных главных блоков FX3U со 100 кГц до 200 кГц. FX3U-2HSY-ADP непосредственно направляет сигнал на высокоскоростные выходы в Y0, Y1, Y4, и Y5 или Y2, Y3, Y6, и Y7 (в зависимости от адреса адаптера). На ЦП FX3U можно использовать максимум два высокоскоростных выходных адаптера, что обеспечивает до четырех высокоскоростных выходов. Сервоусилители MR-J3-10A и MR-J3-10B расположены в левом верхнем углу стенда, соответственно сервоусилитель 1 и 2. Сервоусилитель MR-J3-10A может управляется с помощью контроллера через модуль FX3U-2HSY-ADP,а также через аналоговые входы – регулирование скорости и момента, и цифровые входы – задание направление вращения, скорости, смена режима вращения и т.д.. Сервоусилитель MR-J3-10B управляется непосредственно от контроллера, через модуль FX3U-20SSC-H.
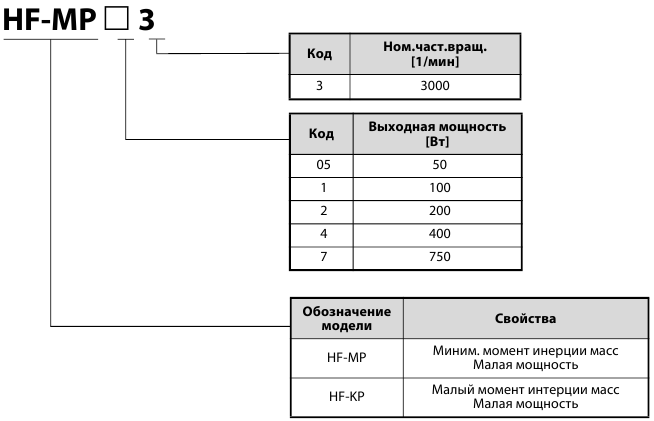
Рисунок 4.7 - Маркировка двигателей, используемых в лабораторном стенде К сервоусилителям подключены серводвигатели модели HF-KP13, которые имеют низкий момент инерции и хорошо подходят к механизмам с переменным моментом инерции нагрузки или механизмам с низкой жесткостью. Разъяснение маркировки серводвигателей, используемых в лабораторной работе, представлено на рисунке 4.7. Общие характеристики и характеристики управления сервоусилителей MR-J3-10A/B представлены в таблицах 4.1, 4.2. Таблица 4.1- Общие характеристики MR-J3-10A/B.
Таблица 4.2 - Характеристики управления MR-J3-10A.
|