DOG (data origin-начало отсчета данных)-тип ручной установки нуля.
Принцип работы DOG-режима установки нуля показан на рисунке 4.17. Пуск установки нуля, как изложено ниже, осуществляется по возрастающему фронту (OFF→ON) командой механической установки нуля.
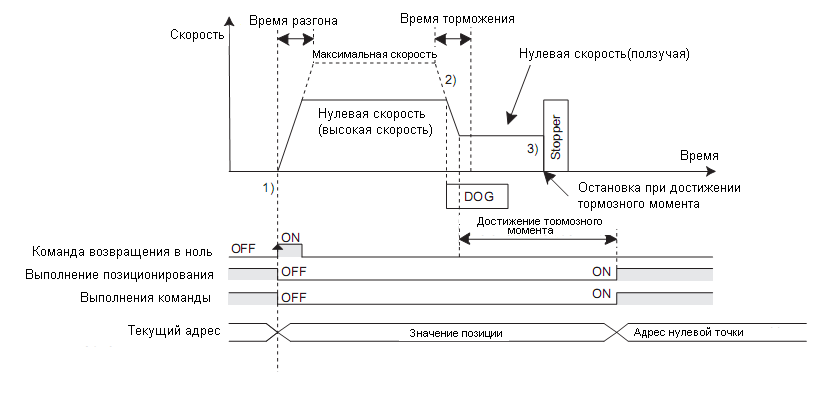
Рисунок 4.17 - Принцип работы DOG-режима установкия нуля 1)По возрастающему фронту (OFF→ON) по команде установки в нуль рабочий орган движется в направлении нулевой позиции с высокой скоростью. 2) На DOG-входе модуль 20SSC-H замедляет работу рабочего органа до минимальной скорости. 3) 20SSC-H считает количество сигналов от датчиков положения. 4) После отсчета заданного количества 20SSC-H останавливает рабочий орган. 5)После достижения нулевой точки рабочий орган не будет двигаться по команде установки в нуль. Data-set –тип ручной установки нуля Этот тип ручной установки нуля используется как процедура установки позиции с JOG-операцией. Т.е. рабочий орган не перемещается по команде установки нуля, а система записывает в память нынешнюю позицию как нулевую. Последовательность процесса установки нуля: 1. Рабочий орган движется в заданном направлении. 2. Запускается команда ручной установки нуля. 3. Записывается адрес нынешней позиции как нулевой точки. Stopper –тип ручной установки нуля Модуль движется до тех пор, пока не упрется в какой-либо объект на его пути, либо пока не дойдет до конца своего пути. Эта точка определяется и записывается в память как нулевая. Stopper –тип ручной установки нуля включает в себя следующие два режима: · Stopper-тип 1(рисунок 4.18) В этом методе возвращения нуля используются DOG сигнал и упор. Перемещения с высокой скоростью возможно при использовании DOG-сигнала, так этот тип возвращения нуля сокращает время возврата. · Stopper-тип 2 (рисунок 4.19) В этом методе используется возвращение нуля только с помощью упора. 1.Stopper –тип 1
Рисунок 4.18 - Принцип работы Stopper1-режима возвращения нуля 1) По возрастающему фронту (OFF→ON) по команде возвращения в ноль, рабочий орган движется в направлении нулевой точки с высокой скоростью. 2) При подходе к нулевой точке, скорость движения замедляется. 3) Рабочий орган касается упора и останавливается, когда момент серводвигателя достигает предельного значения. 4) После остановки 20SSC-H записывает новый адрес нулевой точки. 2. Stopper –тип 2
Рисунок 4.19 - Принцип работы Stopper2-режима возвращения нуля 1. По возрастающему фронту (OFF→ON) по команде возвращения в ноль, рабочий орган движется в направлении нулевой точки с высокой скоростью. 2. Рабочий орган касается упора и останавливается, когда момент серводвигателя достигает предельного значения. 3. После остановки 20SSC-H записывает новый адрес нулевой точки.
|