Хар-ка упр. выпрямителя. Коэф. передачи выпрямителя.
Характеристикой упр. выпр. наз-ся зависимость постоянной составляющей ЭДС выпрямителя Е функции напряжения управления Uу. Е=f(α) (1) – хар-ка упр. ВК. У=Е0*cosα – для управляемых выпр., E=E0(1+cosα)/2 – для попууправляемых выпр. α=f(Uу) (2)– хар-ка упр. СИФУ. Для получения выражения. Е=f(Uу) необходимо подставить выражение (2) в выражение (1). Если напряжение пилообразное, тоα=180*(Uу +αнач)/ Uпmax. Выражение хар-ки упр. для полностью управляемого выпрямителя с пилообразным напряжением СИФУ: Е=Е0*cos(-180* Uу/ Uпmax+αнач). Если α=90, то Е=Е0*sin(180* Uу/ Uпmax). Различают статический и дин. коэф. усиления выпрямителя. Статическим коэф. наз. отношение постоянной составляющей ЭДС к напр. управления соотв. Этой ЭДС. Динамическим коэф. наз.отношение приращения выпрямленной ЭДС к приращению напр. управления при стремлении Uу к 0. Kд=180*Е0/ Uпmax* cos(180* Uу/ Uпmax). 32. Системы электропривода ПШИУ – ДПТ. Характеристики управления широтно-импульсного модулятора. ПШИУ – структурно состоит из двух частей: 1. Системы управления полупроводниковыми приборами 2. Системы управления вентильным коммутатором Входной координатой ПШИУ и ШИМ явл. Напряжение управления Uу формируемое САУ электропривода. Выходной координатой ШИМ явл. Скважность импульсов(гамма) которая явл. Входной координатой вентильного коммутатора. Выходной координатой ПШИУ является напряжение Uп Пшиу в ЭП предназначен для управления электродвигателя постоянного тока путем целенаправленного изменения напряжения(тока) якорной цепи ДПТ. Пшиу осуществляет преобразование постоянного напряжения источника питания в регулируемое по величине постоянного напряжения. Источником питания постоянного напряжения может служить неуправляемый или управляемый выпрямители, аккумуляторная батарея, солнечная батарея, сеть постоянного тока.
Основным элементом ШИМ является нульорган. В кач-ве опорного напряжения могут использования: 1.пилообразное (положительное, отрицательное) В ШИМ могут быть использованы приведенные напряжения однополярные пилообразные 1 и 2(с задним и передним фронтом), они могут быть так же и отрицательной полярности, однополярная треугольная – 3, двухполярная пилообразная – 4 с задним фронтом и 6 с передним. Двухполярная -5.
33. Электромагнитные процессы в якорной цепи двигателя системы электропривода «нереверсивный ПШИУ – ДПТ» В электроприводе постоянного тока исп-ся две схемы электропривода с нереверсивным ПШИУ: 1. Одноключевой (последовательный ПШИУ – ДПТ) 2. Полумостовой ПШИУ – ДПТ
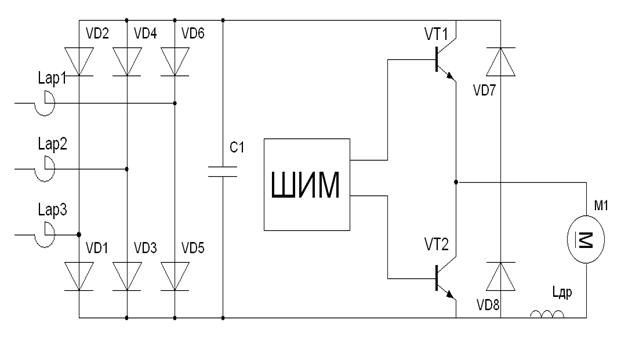
В кач-ве примера на схеме источником питания формируем напряжение Uип, использ. Неуправляемый выпрямитель подключенный к сети через токоограничивающие реакторы L1-L3 с емкостным фильтром Cф на выходе. Вентильный коммутатор ПШИУ состоит из транзистора VT1 и диода VD1. Эти два полупроводниковых прибора могут изготавливаться в одном корпусе и носят название чопер. Принцип действия вентильного коммутатора основан на импульсной модуляции напряжения Uип(широтной или частотной)
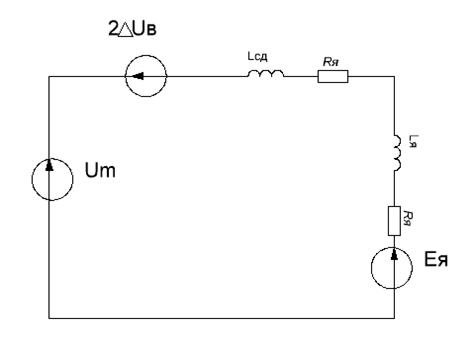
Работа на периоде коммутации Тк подразделяется на два интервала: 1. Регулирование напряжение на якоре двигателя осуществляется путем периодической коммутации ключа VT1 (IGBT), при падаче положительного потенциала на базу транзистора в течение интервала tc он открыт. Интервал 0 ≤ t ≤ t0 Схема замещения:
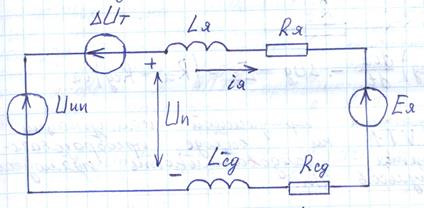
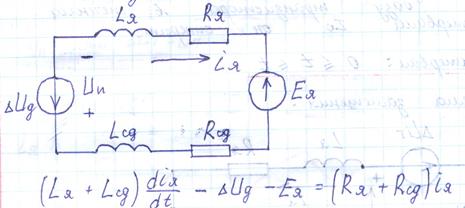
Uип-∆Uт-(Lя+Lсд)*(diя\dt) – Eя = (Rя+Rсд)iя 2. Интервал t0 ≤ t ≤ Tк Схема замещения:
34. Электромагнитные процессы в якорной цепи двигателя системы ЭП: «полумостовой ПШИУ – ДПТ»
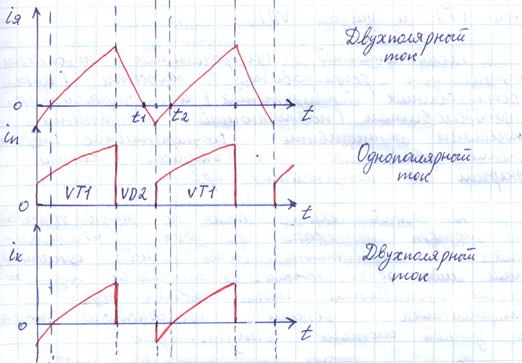
Диаграммы работы:
t0 – время, в течение которого на верхний транзистор VT1 подан открывающий импульс. Dt – мёртвое время
Полумостовой ПШИУ состоит из двух преобразователей: последовательного одноключевого (VT1, VD2) и параллельного (VT2, VD1) Пониженное ПШИУ Повышенное ПШИУ
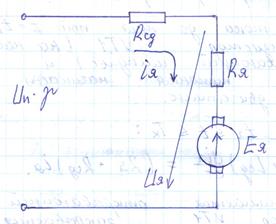
Пониженное обеспечивает регулирование скорости двигателя, а повышенное обеспечивает торможение с отдачей энергии в сеть.В данной системе ЭП РПТ отсутствует. В связи с этим различают 2 режима тока: режим однополярного тока (ОПТ) и режим двухполярного тока (ДПТ). В схеме открыв. Импульсы на транзисторы подаются в противофазе. 35.электромеханические характеристики двигателя постоянного тока в системе Электропривода «нереверсивный ПШИУ – ДПТ» Электромеханической характеристикой в системе назыв. Зависимость среднего значения скорости от среднего значения тока якоря при постоянном значении скважности(гамма). Выражение механической характеристики: Wср=Uя\kФ – Rя*Iя\kФ схема замещения для средних значений:
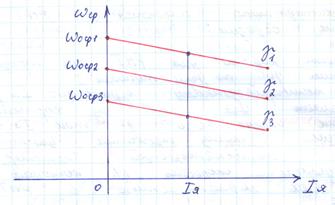
1-ая электромеханическая 2-ая механическая Хар-ки будут иметь вид прямых:
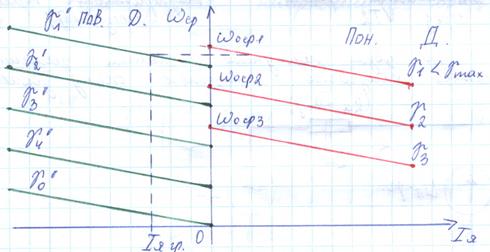
36. электромеханические характеристики двигателя постоянного тока в системе Электропривода «полумостовой ПШИУ – ДПТ» Т.к. в данной системе РПТ отсутствует то хар-ка будет описываться следующим выражением:
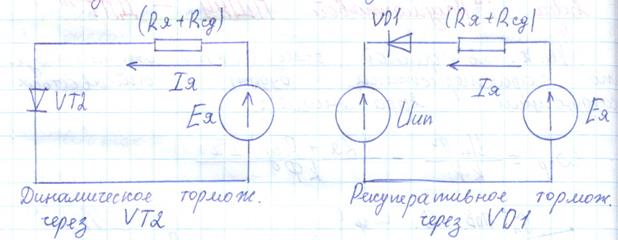
Т.к. полумостовой преобразователь обеспечивает протекание тока по якорю двигателя в двух направлениях, то имеется возможностьосуществления тормозногорежима работы двигателя. Для перевода двигателя в режим торможения необходимо уменьшить гамма, т.е. уменьшить время t0 и увеличить Tк-t0. При этом сокращается время потребления энергии от ист. Питания к двигателю и увеличивается время отдачи энергии от двигателя в источник питанияи в тепло на активных сопротивлениях. Для средних значений будут справедливы две схемы замещения:
37. Электромагнитные процессы в якорной цепи двигателя системыэлектропривода "реверсивный ПШИУ - ДПТ" с несимметричной коммутацией
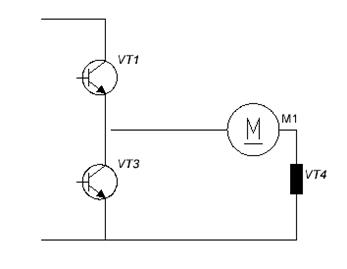
При несимметричном управлении на VT1 и VT3 подаются открывающие импульсы в противофазе (мертвое время не указано), На транзистор VT3 подан открывающий импульс, на транзистор VT2 подан закрывающий импульс. В результате схема мостового ПШИУ преобразуется к схеие полумостового преобразователя. Следовательно электромагнитные процессы в данной схеме протекают аналогично как и в полумостовом ПШИУ. При необходимости реверсирования двигателя путем подачи открывающих импульсов на транзисторы VT2, VT4 и VT3 по соответствующему алгоритму собирается схема полумостового преобразователя позволяющая протекать току в обратном направлении. В результате на якоре двигателя формируется последовательность однополярных импульсов напряжения.
Характеристика:
Iя, М
В системе электропривода мостовой ПШИУ-ДПТ в отличие от системы электропривода полумостовой ПШИУ-ДПТ можно обеспечить торможение двигателя до γ=0 при стабилизации тормозного момента на уровне превышающий допустимый.
38.Электромагнитные процессы в якорной цепи двигателя системы электропривода "реверсивный ПШИУ - ДПТ" с симметричной коммутацией
Uvt1,Uvt4
t
t
t
iя
t ДПТ
При данном способе коммутации открывающие импульсы подаются в противофазе на пары транзисторов VT1,VT4 и VT2, VT3. (мертвое время не указано). Ток в схеме при такой коммутации может быть как однополярным, так и двухполярным. Несмотря на то, что открывающие импульсы подаются на VT2, VT3 они не откроются при однополярном токе, т.к. зашунтированы открытыми диодами VD2,VD3, по которым протекает ток на интервалах
На интервалах
39. Электромагнитные процессы в якорной цепи двигателя системы электропривода "реверсивный ПШИУ - ДПТ" с диагональной коммутацией
Вперед t
t
Uvt2,Uvt3
t Uvt1,Uvt4
РНТ t
Un,iя РПТ t
iп t
При диагональной коммутации открывающие импульсы подаются лишь на 2 транзистора одновременно из четырех, в зависимости от направления вращения: вперед на VT1, VT4, а назад на VT2,VT3. 1) 0<t<tк на этом интервале VT1 и VT4 открыты, цепь якоря подключена к источнику питания
Уравнение Кирхгоффа:
Энергия потребл.: часть в тепло, часть в механическую 2) t0<t<Tк все транзисторы закрыты, но ток протекает в том же направлении, замыкаясь через диод – VD2 – +Cф – – Сф – VD3 – якорь. Диоды VD2 и VD3 открываются под действием изменивши свое направление ЭДС самоиндукции. Схема замещения:
Уравнение Кирхгоффа:
При этом энергия накопленная в индуктивности преобразуется в механическую, часть расходуется в тепло, а часть возвращается в источник питания.
|











 Uvt1
Uvt1
 Uvt3
Uvt3


 Uvt2,4
Uvt2,4 Uvt4
Uvt4








 - (+ при тормозном режиме)
- (+ при тормозном режиме)
 Wср
Wср



 Тк
Тк




 Uvt2,Uvt3
Uvt2,Uvt3