Кинематические схемы экскаваторов
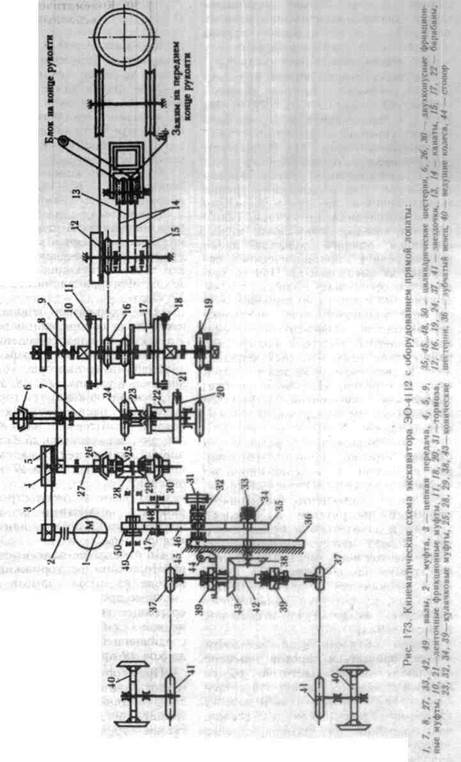
Кинематической схемой машины называется условное схематическое изображение ее механизмов, показывающее их взаимосвязь и способ передачи движения от двигателя к рабочим механизмам. С целью упрощения чертежа применяют условные обозначения различных элементов механизмов. Рассмотрим кинематическую схему экскаватора ЭО-4112 (рис. 173), оборудованного прямой лопатой. Движение от вала / двигателя к рабочим механизмам передается цепными, шестеренными и канатными передачами при включении главной муфты 2 и соответствующих кулачковых 23, 32, 34, 39 и фрикционных 6, 10, 21, 26, 30 муфт. Для удержания ковша, рукояти и стрелы в определенном положении, а также для предотвращения вращения поворотной платформы при передвижении экскаватора установлены ленточные тормоза 11, 18, 20, 31. Экскаватор имеет три горизонтальных вала, расположенных на поворотной платформе: вал 8 главной лебедки, промежуточный вал 7, являющийся одновременно валом лебедки подъема стрелы, и вал 27 механизма реверса.. Механизм подъема стрелы может работать независимо от механизма поворота платформы или одновременно с ним. Во избежание падения стрелы при неосторожном растормаживании или выходе из строя тормоза 20 предусмотрено противообгонное устройство, состоящее из звездочки, жестко соединенной с барабаном 22, и цепи, соединяющей эту звездочку со звездочкой 19 противообгонной муфты. При опускании стрелы, когда частоты вращения звездочки 19 и вала 8 будут равны, противообгонная муфта срабатывает, при этом скорость опускания стрелы ограничивается частотой вращения вала главной лебедки. Реверс механизмов поворота плат-
формы и передвижения машины осуществляется коническими шестернями 25, 28 и 29 и двухконусными фрикционными муфтами 26 и 30. От вертикального вала 49 движение передается к обегающей шестерне 45 или к ведущим колесам 40 механизма передвижения. Кулачковые муфты 32 и 34 не могут быть включены одновременно и поэтому от вала 49 движение может быть передано на поворотный вал с закрепленной на нем обегающей шестерней 45 или на вертикальный вал 33 механизма передвижения. Следовательно, поворот платформы невозможно совместить с перемещением экскаватора. Механизмы поворота платформы и передвижения машины работают с двумя скоростями. Достигается это соединением сдвоенной шестерни 50 с шестерней 48 (малая скорость) или с шестерней 47 (большая скорость). Меньшую скорость поворота платформы используют при работе с крановым оборудованием, большую — при работе с землеройным оборудованием. При копании ходовая тележка экскаватора должна быть неподвижной, чтобы исключить непроизвольное перемещение машины. Обеспечивается это двусторонним управляемым стопором 44, который удерживает от вращения горизонтальный вал 42 механизма передвижения и обе гусеничные ленты. Рабочее оборудование прямой лопаты оснащено канатным механизмом комбинированного типа. При вращении барабана 15 на него снизу наматываются оба конца напорного каната 14, а с верхней части барабана отпускается возвратный канат 13. Задний конец рукояти подтягивается к седловому подшипнику и происходит напор ковша на грунт. При вращении барабана 15 в обратную сторону на него навивается возвратный канат 13 и разматывается напорный канат 14, т. е. происходит возврат рукояти. Барабан 15 вращается как при включении фрикционных муфт 6 и 10, так и при растормаживании тормоза 11, когда включен подъем ковша. В последнем случае подъемный канат будет разматываться с дополнительного барабана, который жестко соединен с напорным барабаном 15, и вращать его. Кинематические схемы экскаваторов 3-й размерной группы будут рассмотрены при описании устройства конкретных моделей.
|