
Общая теория электромеханических преобразователей
Основу анализа процессов в электрических машинах и аппаратах составляют уравнения Максвелла, устанавливающие для любой точки пространства следующую систему соотношений
где приняты следующие обозначения: B и D – индукции соответственно магнитного и электрического полей, с – константа, равная скорости света, r - плотность электрического заряда, j – плотность тока, связанная со скоростью v движения заряда
Эти уравнения должны быть дополнены уравнениями состояния,
где E и H – соответственно напряженности электрического и магнитного полей, и уравнением для силы Лоренца
Кроме того, в систему уравнений входит уравнение движения, устанавливающее связь между развиваемым двигателем моментом M, моментом сопротивления производственной машины MC, моментом инерции привода J и изменением угловой скорости w
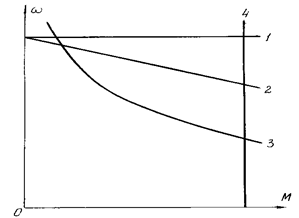
Зависимости моментов от угловой скорости M(w) и MC(w) представляют собой механические характеристики электродвигателя и производственной машины. Для характеристики MC(w) обычно используют эмпирическое уравнение MC = M0 + (MCH – MC)(w/wH)a, где M0 – момент сопротивления при холостом ходе, MСН – момент сопротивления при номинальном режиме и номинальной угловой скорости wН, a - числовой коэффициент, зависящий от особенностей рабочей машины. В зависимости от величины этого коэффициента различают четыре основных группы машин. Соответствующие им характеристики приведены на рисунке 3.
Зависимости 1, 2 3 и 4 соответствуют абсолютно жесткой, жесткой, мягкой и абсолютно мягкой характеристикам. Отношение b = DM / Dw разности моментов DM = M2 – M1 -к соответствующей разности угловых скоростей электродвигателя Dw = w2 – w1 называется жесткостью его механической характеристики. Аналогичным образом определяется жесткость характеристики механизма bС.
С понятием жесткости тесно связано понятие статической устойчивости, под
Рис. 4. Характеристика двигателя Рис. 5. Характеристика постоянного тока асинхронного двигателя
которой понимают такое состояние установившегося режима работа привода, когда при случайно возникшем отклонении скорости от установившегося значения привод возвращается в точку установившегося режима. Устойчивость имеет место при выполнении условия b-bС <0. Для примера на рис.5 рассмотрены режимы работы двигателя постоянного тока независимого возбуждения на механизм с постоянными моментами нагрузки, M1 и M2, а на рис.6 - асинхронного двигателя на механизм с постоянным моментом (сплошная линия) и механизмы с вентиляторной характеристикой (пунктирные линии). При постоянном моменте нагрузки устойчивость определяется только жесткостью механической характеристики двигателя. Если она отрицательна, то работа в установившемся режиме устойчива, иначе – неустойчива (точка б на рис. 6). Работа же асинхронного двигателя на механизм с вентиляторной характеристикой, как легко показать с помощью рис. 6, в обеих точках устойчива.
|
 ,
, .
. ,
, .
. .
.
 Зависимости 1 (при a=0) соответствуют механические характеристики подъемных машин, лебедок, ленточных и винтовых транспортеров, поршневых насосов с постоянной вы сотой подъема, некоторых механизмов подач металлорежущих стан ков, конвейеров с постоянной массой передвигаемого материала; зависимости 2 (при a = 1) приводы генераторов постоянного тока с независимым возбуждением при работе на постоянную нагрузку; зависимости 3 (при a=2) – вентиляторы, центробежные насосы, гребные винты, зависимости 4 (при a=-1) – некоторые металлорежущие станки.
Зависимости 1 (при a=0) соответствуют механические характеристики подъемных машин, лебедок, ленточных и винтовых транспортеров, поршневых насосов с постоянной вы сотой подъема, некоторых механизмов подач металлорежущих стан ков, конвейеров с постоянной массой передвигаемого материала; зависимости 2 (при a = 1) приводы генераторов постоянного тока с независимым возбуждением при работе на постоянную нагрузку; зависимости 3 (при a=2) – вентиляторы, центробежные насосы, гребные винты, зависимости 4 (при a=-1) – некоторые металлорежущие станки.
 Для механических характеристик электродвигателей характерно уменьшение скорости вращения при возрастании крутящего момента. Это изменение характеризуется жесткостью механической характеристики. Типовые характеристики различных электродвигателей приведены на рисунке 4.
Для механических характеристик электродвигателей характерно уменьшение скорости вращения при возрастании крутящего момента. Это изменение характеризуется жесткостью механической характеристики. Типовые характеристики различных электродвигателей приведены на рисунке 4.




