Физические принципы построения емкостных преобразователей
Сущность работы емкостных измерительных преобразователей заключается в изменении под действием измеряемой физической величины их электрической емкости, что, в свою очередь, отражается на величине их входного сигнала. Электрическая емкость конденсатора, образованного параллельными пластинами, определяется по формуле С=εoεn(n-1)(A/a) где n-число пластин; A - площадь одной стороны пластины; d — толщина диэлектрика, расположенного между пластинами; ε0, - относительная диэлектрическая проницаемость этого диэлектрика; εn - диэлектрическая проницаемость вакуума, т.е. вполне определенная константа. Для измерений смещений менее 1 мм применяют емкостные преобразователи с изменяющимся расстоянием между пластинами. Для измерения смещений, превышающих 1 мм, чаще всего используются преобразователи с изменяющейся площадью перекрытия пластин. Емкостные преобразователи могут быть использованы как для статических, так и для динамических измерений, но применяются главным образом в стационарных условиях для проведения стендовых исследований и прецизионных измерений физических величин. Конструктивные принципы построения емкостных датчиков механических величин Емкостные датчики широко применяются для измерения таких механических величин как вибрации, перемещения, скорости, ускорения, усилия, крутящие моменты и давление. Распространенным устройством, преобразующим акустические колебания окружающей воздушной среды в соответствующие электрические сигналы, является емкостный микрофон рис. 6.
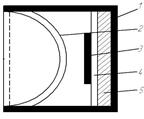
Рис. 6. Конструктивная схема емкостного микрофона
Конструктивная схема емкостного микрофона, который содержит размещенные в корпусе 1 мембрану 2 из электропроводящего материала, неподвижную пластину 3, установленную на диэлектрике 4, и демпфирующий слой 5. При изменении акустического давления мембрана 2 деформируется и изменяется ее расстояние до пластины 3. В результате происходит изменение электрической емкости микрофона, что и используется.
|