
Классификация и структурные схемы САУ
Автоматизированная система регулирования (АСР) – комплекс технических средств, обеспечивающий сбор и обработку информации о состоянии объекта, выработку и реализацию управляющего воздействия без непосредственного участия человека. Любая АСР состоит из расширенного объекта, в который дополнительно входят средство измерений и регулирующий орган, и управляющего устройства (регулятора). Под действием возмущения z(t) выходная величина y(t) отклоняется от заданного значения. Задача регулятора – оказать такое управляющее воздействие на объект μ(t), чтобы выходная величина вернулась в исходное состояние. В зависимости от источника информации, используемого для выработки управляющего воздействия АСР делят на действующие по отклонению, возмущению.
Таким образом, на вход объекта дополнительно действует величина, пропорциональная выходной, т.е. имеет место обратная связь. Положительная обратная связь - когда основной входной сигнал и сигнал обратной связи действуют в одном направлении (суммируются). Как правило, положительная ОС улучшает динамику объекта, но приводит к его неустойчивости. Отрицательная ОС - когда основной входной сигнал и сигнал обратной связи действуют в противоположных направлениях (вычитаются). Отрицательная ОС – оказывает стабилизирующее воздействие и поэтому чаще используется в автоматике. Достоинством таких АСР является возможность формирования управляющего воздействия независимо от числа, места и характера проявления возмущений. Недостаток заключается в том, что регулятор начинает действовать после того, как возмущение проникло в объект и вызвало изменение выходной величины. Поэтому применение АСР по отклонению ограничено на инерционных объектах. В системах по возмущению (разомкнутых) регулятор вырабатывает управляющее воздействие при отклонении контролируемого возмущения от номинального значения, что позволяет компенсировать это возмущение еще до того, как оно изменит выходную величину. Однако практическая реализация этого принципа для многих объектов невозможна вследствие большого числа возмущений и, кроме того, не все они могут быть оценены количественно.
В комбинированных системах один из контуров замкнутый и регулятор стабилизирует значение выходной величины. Кроме того, на исполнительный механизм через динамический компенсатор действует корректирующий сигнал, пропорциональный наиболее сильному возмущению.
Основной регулятор должен обеспечивать регулирование без статической ошибки и поэтому содержит интегральную составляющую. Вспомогательный регулятор должен быть быстродействующим и может быть пропорциональным. По назначению (характеру изменения сигнала задания uз(t) во времени) АСР подразделяют на: - стабилизирующие – сигнал задания не изменяется, - программные – сигнал задания изменяется во времени по известному закону, - следящие – сигнал задания изменяется во времени по ранее неизвестному закону. Стабилизирующие АСР позволяют обеспечить требуемое качество регулирования в тех случаях, когда для оптимального протекания технологического процесса достаточно поддерживать постоянными входные потоки вещества (сырья) или энергии. В химической промышленности таких процессов в чистом виде не существует и приходится либо предъявлять невысокие требования к АСР либо использовать более сложные. Следящие АСР применяются для регулирования одного технологического параметра, находящегося в определенной зависимости от другого (который менее инерционен или проще измеряется). Наиболее распространенные АСР и в сочетании со стабилизирующими позволяют получить высокое качество регулирования. Программные АСР используют в основном в периодических процессах, когда регулируемый параметр имеет различные значения в разные моменты времени, а также при пусках или остановах процесса. По характеру регулирующих воздействий различают релейные, непрерывные и импульсные системы. В импульсных системах на ИМ воздействует дискретный сигнал. В основном они применяются в цифровых системах регулирования. Позволяют уменьшить энергию, необходимую для приведения в действие ИМ.
|
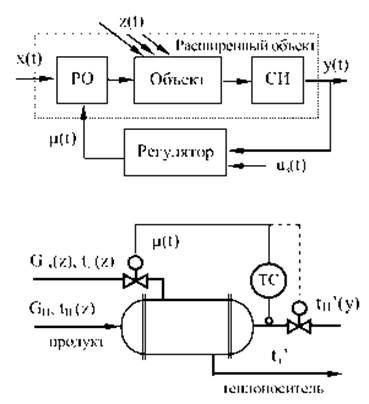 В АСР, работающих по отклонению (замкнутые системы), регулятор сравнивает выходную величину y(t) c заданием u з (t) и, если они не равны, вырабатывает управляющее воздействие μ(t), соответствующее величине рассогласования и закону регулирования. Под воздействием μ(t) изменяется положение регулирующего органа и, соответственно, поступление в объект вещества или энергии.
В АСР, работающих по отклонению (замкнутые системы), регулятор сравнивает выходную величину y(t) c заданием u з (t) и, если они не равны, вырабатывает управляющее воздействие μ(t), соответствующее величине рассогласования и закону регулирования. Под воздействием μ(t) изменяется положение регулирующего органа и, соответственно, поступление в объект вещества или энергии.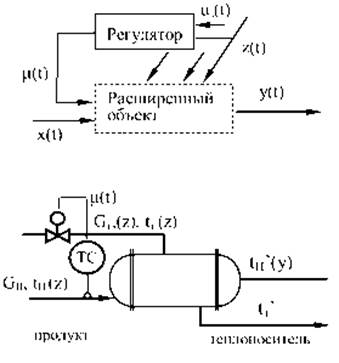 Рассмотренные системы называются одноконтурными и обеспечивают заданное качество регулирования только в ограниченных случаях при благоприятных динамических свойствах объектов. Большинство объектов энергетики (энергетические установки, энергоемкие химические процессы) характеризуется сложными взаимосвязями параметров и значительными постоянными времени и временами запаздывания. Поэтому требуемое качество регулирования может быть обеспечено, только с помощью многоконтурных систем, простейшими из которых являются комбинированные и каскадные.
Рассмотренные системы называются одноконтурными и обеспечивают заданное качество регулирования только в ограниченных случаях при благоприятных динамических свойствах объектов. Большинство объектов энергетики (энергетические установки, энергоемкие химические процессы) характеризуется сложными взаимосвязями параметров и значительными постоянными времени и временами запаздывания. Поэтому требуемое качество регулирования может быть обеспечено, только с помощью многоконтурных систем, простейшими из которых являются комбинированные и каскадные.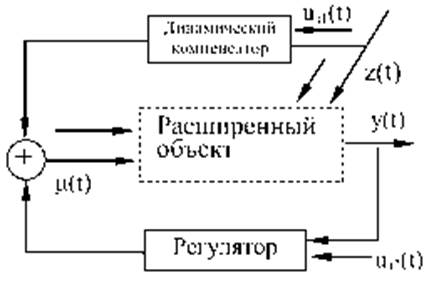
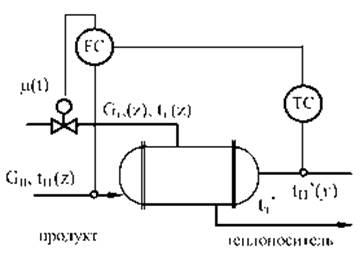 Каскадные схемы состоят из двух регуляторов – основного, стабилизирующего основную выходную величину, и вспомогательного, сигналом задания которого служит выход основного регулятора.
Каскадные схемы состоят из двух регуляторов – основного, стабилизирующего основную выходную величину, и вспомогательного, сигналом задания которого служит выход основного регулятора.


