Показатели качества регулирования. Оптимальный переходный процесс
Переходной процесс характеризует поведение системы в период с момента нанесения возмущения до установления нового равновесного состояния. Он зависит от динамических свойств объекта и регулятора, входных воздействий и начальных условий. При одних и тех же воздействиях переходной процесс может протекать поразному. Вид переходного процесса и его характеристики позволяют оценить качество регулирования.
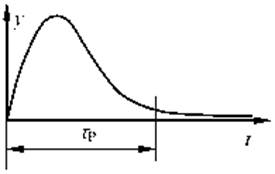
Количественными показателями качества регулирования являются: Статическая ошибка yст – отклонение нового установившегося значения регулируемой величины от заданного. Динамическая ошибка yдин – максимальное отклонение регулируемой величины от заданного в переходном процессе. Время регулирования τ Р – время, за которое регулируемая величина достигает нового установившегося значения с заданной точностью ± ε. Интегральная квадратичная ошибка – квадрат площади между кривой переходного процесса и новым установившимся значением:
Перерегулирование, которое определяют по одной из формул:
где у 1 и у 2 – амплитуды первого и второго колебаний, направленных в противоположные стороны. Чем меньше значения параметров, тем выше качество регулирования. В качестве оптимальных выбирают один из трех переходных процессов: - граничный апериодический, - с 20% - ным перерегулированием, - с минимальной квадратичной площадью отклонения. Граничный апериодический процесс характеризуется минимальным (по сравнению с другими) воздействием регулятора на объект, вследствие чего динамическая ошибка имеет наибольшее значение. Время регулирования в этом процессе – минимальное. Такой процесс используется в качестве оптимального при значительном влиянии регулирующего воздействия на другие параметры объекта.
Процесс с 20% -ным перерегулированием характеризуется бóльшим регулирующим воздействием. При этом динамическая ошибка несколько уменьшается, а время регулирования – увеличивается. Используется если допустимо перерегулирование.
Процесс с минимальной квадратичной площадью отклонения характеризуется самым большим регулирующим воздействием. Динамическое отклонение в процессе самое малое, а время регулирования - наибольшее. Используется в качестве оптимального если отклонение параметра от заданного должно быть минимальным.
|
 Качество регулирования оценивается отклонением реального переходного процесса от заданного и показывает как быстро и точно в системе устанавливается новое равновесное состояние при ступенчатом возмущении.
Качество регулирования оценивается отклонением реального переходного процесса от заданного и показывает как быстро и точно в системе устанавливается новое равновесное состояние при ступенчатом возмущении.